Badanie mikrokontrolera ATMEGA2560
Mikrokontroler ATMEGA2560, wybitny przedstawiciel architektury AVR RISC, jest obchodzony ze względu na swoją wydajność, wykonując potężne instrukcje w jednym cyklu zegarowym.W tym artykule nurkowano w podstawowych specyfikacjach ATMEGA2560, w tym ekspansywnej pamięci, elastycznej konfiguracji pinout i wszechstronnych protokołach komunikacyjnych, takich jak UART, SPI i I2C.Ponadto zbadamy jego godne uwagi funkcje i różnorodne aplikacje, od robotyki po IoT, a także praktyczne spostrzeżenia projektowe w celu maksymalizacji jej funkcjonalności.Niezależnie od tego, czy projektujesz złożone systemy sterowania, czy energooszczędne rozwiązania, ten artykuł zapewni wiedzę na rzecz wykorzystania pełnego potencjału ATMEGA2560 w twoich projektach.Katalog
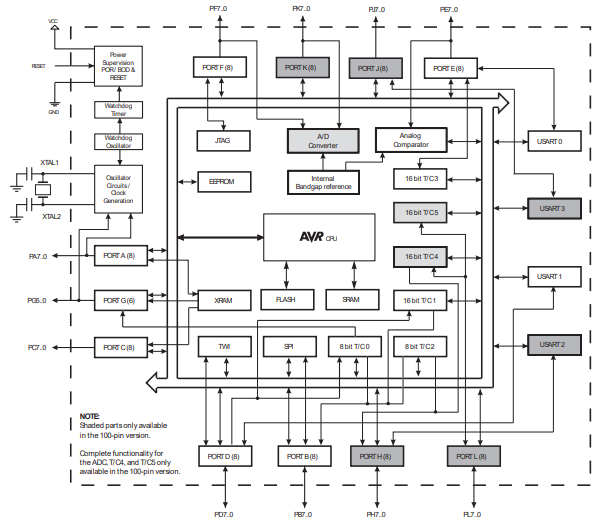
ATMEGA2560 Przegląd
. ATMEGA2560 Odgrywa intensywną rolę jako mikrokontroler w tablicach Arduino Mega 2560, celebrowany ze względu na swoje sprawność w zarządzaniu zarówno solidnymi, jak i złożonymi aplikacjami.Działając z architekturą opartą na AVR RISC, optymalnie łączy prędkość przetwarzania z ochroną energii, wykonując skomplikowane polecenia w jednym cyklu zegara.Ten atrybut to nie tylko abstrakcyjna koncepcja;Przeciwnie, programiści szeroko zasługują na to, aby tworzyć płynnie interaktywne systemy działające w czasie rzeczywistym.
Poza projektowaniem strukturalnym ATMEGA2560 prezentuje połączenie szybkiego wykonywania z uważnym zużyciem energii.Jego zwinność w zarządzaniu złożonymi zadaniami sprawia, że jest to poszukiwany wybór projektów świadomych energii.Rzeczywiście, wielu ekspertów branżowych zaciągnęło tę synergię, aby opracować schematy zarządzania energią w gadżetach zależnych od baterii, w ten sposób znacznie wydłuża ich okresy funkcjonalne bez zmniejszania wydajności.
Szeroka zdolność adaptacyjna ATMEGA2560 znajduje echa w różnych sektorach, takich jak robotyka i nadzór ekologiczny.Rozległa gama zintegrowanych peryferyjów zwiększa szybkość rozwoju i zmniejsza poleganie na dodatkowym sprzęcie, łagodząc podróż projektową.Korzystając z osobistego doświadczenia, programiści często potwierdzają swoją elastyczność w tworzeniu systemów modułowych wymagających skalowalności i szybkiego prototypowania;Te refleksje są zabarwione własną żarliwą pasją i wnikliwymi ocenami.
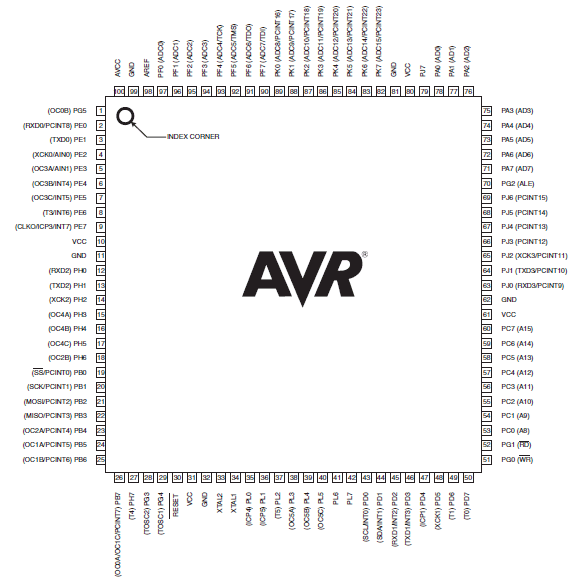
Konfiguracja pinu ATMEGA2560
|
Numer pin |
Nazwa pin |
Zamapowana nazwa pin |
|
1 |
PG5 (OC0B) |
Cyfrowy pin 4 (PWM) |
|
2 |
PE0 (RXD0/PCINT8) |
Cyfrowy pin 0 (rx) |
|
3 |
PE1 (TXD0) |
Cyfrowy pin 1 (TX) |
|
4 |
PE2 (xck0/ain0) |
|
|
5 |
PE3 (OC3A/AIN1) |
Cyfrowy pin 5 (PWM) |
|
6 |
PE4 (OC3B/INT4) |
Cyfrowy pin 2 (PWM) |
|
7 |
PE5 (OC3C/INT5) |
Cyfrowy pin 3 (PWM) |
|
8 |
PE6 (T3/INT6) |
|
|
9 |
PE7 (CLK0/ICP3/INT7) |
|
|
10 |
VCC |
VCC |
|
11 |
GND |
GND |
|
12 |
Ph0 (rxd2) |
Cyfrowy pin 17 (RX2) |
|
13 |
Ph1 (txd2) |
Cyfrowy pin 16 (TX2) |
|
14 |
PH2 (xck2) |
|
|
15 |
PH3 (OC4A) |
Cyfrowy pin 6 (PWM) |
|
16 |
PH4 (OC4B) |
Cyfrowy pin 7 (PWM) |
|
17 |
Ph5 (OC4C) |
Cyfrowy pin 8 (PWM) |
|
18 |
Ph6 (OC2B) |
Cyfrowy pin 9 (PWM) |
|
19 |
PB0 (SS/PCINT0) |
Cyfrowy pin 53 (ss) |
|
20 |
PB1 (SCK/PCINT1) |
Cyfrowy pin 52 (SCK) |
|
21 |
PB2 (MOSI/PCINT2) |
Cyfrowy pin 51 (MOSI) |
|
22 |
PB3 (MISO/PCINT3) |
Cyfrowy pin 50 (miso) |
|
23 |
PB4 (OC2A/PCINT4) |
Cyfrowy pin 10 (PWM) |
|
24 |
PB5 (OC1A/PCINT5) |
Cyfrowy pin 11 (PWM) |
|
25 |
PB6 (OC1B/PCINT6) |
Cyfrowy pin 12 (PWM) |
|
26 |
PB7 (OC0A/OC1C/PCINT7) |
Cyfrowy pin 13 (PWM) |
|
27 |
Ph7 (t4) |
|
|
28 |
PG3 (TOSC2) |
|
|
29 |
PG4 (TOSC1) |
|
|
30 |
NASTAWIĆ |
NASTAWIĆ |
|
31 |
VCC |
VCC |
|
32 |
GND |
GND |
|
33 |
XTAL2 |
XTAL2 |
|
34 |
XTAL1 |
XTAL1 |
|
35 |
PL0 (ICP4) |
Cyfrowy pin 49 |
|
36 |
PL1 (ICP5) |
Cyfrowy pin 48 |
|
37 |
PL2 (T5) |
Cyfrowy pin 47 |
|
38 |
PL3 (OC5A) |
Cyfrowy pin 46 (PWM) |
|
39 |
PL4 (OC5B) |
Cyfrowy pin 45 (PWM) |
|
40 |
PL5 (OC5C) |
Cyfrowy pin 44 (PWM) |
|
41 |
Pl6 |
Cyfrowy pin 43 |
|
42 |
Pl7 |
Cyfrowy pin 42 |
|
43 |
PD0 (SCL/INT0) |
Cyfrowy pin 21 (SCL) |
|
44 |
PD1 (SDA/INT1) |
Cyfrowy pin 20 (SDA) |
|
45 |
PD2 (RXD1/INT2) |
Digital Pin 19 (RX1) |
|
46 |
PD3 (TXD1/INT3) |
Cyfrowy pin 18 (TX1) |
|
47 |
PD4 (ICP1) |
|
|
48 |
PD5 (xck1) |
|
|
49 |
PD6 (T1) |
|
|
50 |
PD7 (T0) |
Cyfrowy pin 38 |
|
51 |
PG0 (WR) |
Cyfrowy pin 41 |
|
52 |
PG1 (RD) |
Cyfrowy pin 40 |
|
53 |
PC0 (A8) |
Cyfrowy PIN 37 |
|
54 |
PC1 (A9) |
Cyfrowy pin 36 |
|
55 |
PC2 (A10) |
Cyfrowy pin 35 |
|
56 |
PC3 (A11) |
Cyfrowy pin 34 |
|
57 |
PC4 (A12)
|
Cyfrowy pin 33 |
|
58 |
PC5 (A13) |
Cyfrowy pin 32 |
|
59 |
PC6 (A14) |
Cyfrowy PIN 31 |
|
60 |
PC7 (A15) |
Cyfrowy pin 30 |
|
61 |
VCC |
|
|
62 |
GND |
|
|
63 |
PJ0 (RXD3/PCINT9) |
Cyfrowy pin 15 (RX3) |
|
64 |
PJ1 (TXD3/PCINT10) |
Cyfrowy pin 14 (TX3) |
|
65 |
Pj2 (xck3/pcint11) |
|
|
66 |
PJ3 (PCINT12) |
|
|
67 |
PJ4 (PCINT13) |
|
|
68 |
PJ5 (PCINT14) |
|
|
69 |
PJ6 (PCINT15) |
|
|
70 |
PG2 (ale) |
Cyfrowy pin 39 |
|
71 |
PA7 (AD7) |
Cyfrowy pin 29 |
|
72 |
PA6 (AD6) |
Cyfrowy pin 28 |
|
73 |
PA5 (AD5) |
Cyfrowy pin 27 |
|
74 |
PA4 (AD4) |
Cyfrowy pin 26 |
|
75 |
PA3 (AD3) |
Cyfrowy pin 25 |
|
76 |
PA2 (AD2) |
Cyfrowy pin 24 |
|
77 |
PA1 (AD1) |
Cyfrowy pin 23 |
|
78 |
PA0 (AD0) |
Cyfrowy pin 22 |
|
79 |
PJ7 |
|
|
80 |
VCC |
VCC |
|
81 |
GND |
GND |
|
82 |
PK7 (ADC15/PCINT23) |
Pin analogowy 15 |
|
83 |
PK6 (ADC14/PCINT22) |
Pin analogowy 14 |
|
84 |
PK5 (ADC13/PCINT21) |
Pin analogowy 13 |
|
85 |
PK4 (ADC12/PCINT20) |
Pin analogowy 12 |
|
86 |
PK3 (ADC11/PCINT19) |
Pin analogowy 11 |
|
87 |
PK2 (ADC10/PCINT18) |
Pin analogowy 10 |
|
88 |
PK1 (ADC9/PCINT17) |
Pin analogowy 9 |
|
89 |
PK0 (ADC8/PCINT16) |
Analogowy pin 8 |
|
90 |
PF7 (ADC7/TDI) |
Analogowy pin 7 |
|
91 |
PF6 (ADC6/TMO) |
Pin analogowy 6 |
|
92 |
PF5 (ADC5/TMS) |
Pin analogowy 5 |
|
93 |
PF4 (ADC4/TCK) |
Pin analogowy 4 |
|
94 |
PF3 (ADC3) |
Analogowy pin 3 |
|
95 |
PF2 (ADC2) |
Analogowy pin 2 |
|
96 |
PF1 (ADC1) |
Analogowy pin 1 |
|
97 |
PF0 (ADC0) |
Pin analogiczny 0 |
|
98 |
Aref |
Odniesienie analogowe |
|
99 |
GND |
GND |
|
100 |
Avcc |
VCC |
Model CAD
Symbol
Ślad stopy
Reprezentacja 3D
Specyfikacje techniczne
Oto tabela specyfikacji technicznych, atrybutów, parametrów i podobnych części do technologii mikrochip ATMEGA2560-16au.
|
Typ |
Parametr |
|
Czas realizacji fabryki |
7 tygodni |
|
Uchwyt |
Mocowanie powierzchniowe |
|
Typ montażu |
Mocowanie powierzchniowe |
|
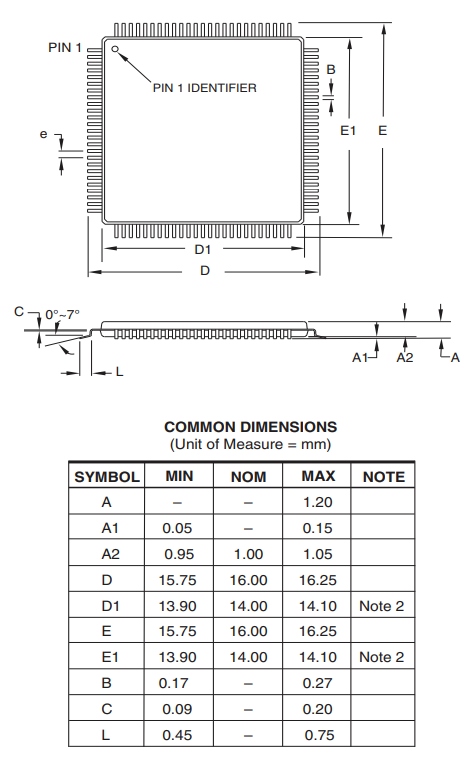
Pakiet / obudowa |
100-TQFP |
|
Liczba szpilek |
100 |
|
Konwertery danych |
A/D 16x10B |
|
Liczba I/OS |
86 |
|
Timery strażnicze |
Tak |
|
Temperatura robocza |
-40 ° C ~ 85 ° C TA |
|
Opakowanie |
Taca |
|
Szereg |
AVR® ATMEGA |
|
Opublikowany |
2009 |
|
Kod JESD-609 |
E3 |
|
Kod PBFree |
Tak |
|
Status części |
Aktywny |
|
Poziom wrażliwości na wilgoć (MSL) |
3 (168 godzin) |
|
Liczba terminów |
100 |
|
Zakończenie |
SMD/SMT |
|
Końcowe wykończenie |
Matowa cyna (SN) - wyżarzona |
|
Dodatkowa funkcja |
Działa również przy minimalnym dostawie 2,7 V przy 8 MHz |
|
Pozycja końcowa |
KWADRAT |
|
Forma końcowa |
Kiwę |
|
Temperatura szczytowa (° C) |
260 |
|
Napięcie zasilania |
5v |
|
Boisko terminala |
0,5 mm |
|
Częstotliwość |
16 MHz |
|
Time@Peak Downflow Temperatura (y) |
40 |
|
Podstawowy numer części |
ATMEGA2560 |
|
Napięcie zasilania roboczego |
5v |
|
Zasilacze |
5v |
|
Interfejs |
2-Wire, EBI/EMI, I2C, SPI, UART, USART |
|
Rozmiar pamięci |
256KB |
|
Typ oscylatora |
Wewnętrzny |
|
Rozmiar pamięci RAM |
8k x 8 |
|
Napięcie - zasilanie (VCC/VDD) |
4,5 V ~ 5,5 V. |
|
UPS/UCS/peryferyjny typ ICS |
Microcontroller, RISC |
|
Podstawowy procesor |
Avr |
|
Peryferyjne |
Brązowy wykrycie/reset, POR, PWM, WDT |
|
Typ pamięci programu |
BŁYSK |
|
Rozmiar rdzenia |
8-bit |
|
Rozmiar pamięci programu |
256KB 128k x 16 |
|
Łączność |
EBI/EMI, I2C, SPI, UART/USART |
|
Rozmiar bitu |
8 |
|
Czas dostępu |
16 μs |
|
Ma ADC |
Tak |
|
Kanały DMA |
NIE |
|
Szerokość magistrali danych |
8b |
|
Liczba liczników/liczników |
6 |
|
Gęstość |
2 MB |
|
Rozmiar EEPROM |
4K x 8 |
|
Liczba kanałów ADC |
16 |
|
Liczba kanałów PWM |
12 |
|
Liczba kanałów I2C |
1 |
|
Wysokość |
1,05 mm |
|
Długość |
14,1 mm |
|
Szerokość |
14,1 mm |
|
Dotrzyj do SVHC |
Brak SVHC |
|
Hartowanie promieniowania |
NIE |
|
Status Rohs |
ROHS3 zgodne |
|
Ołów za darmo |
Ołów za darmo |
Cechy
|
Kategoria funkcji |
Funkcja |
|
Segmenty pamięci o wysokiej wytrzymałości |
Pisz/wymazuje cykle: 10 000 lampy błyskowej |
|
Atmel QTouch Wsparcie biblioteczne |
Tak |
|
Interfejs JTAG |
IEEE STD.1149.1 Zgodność |
|
Funkcje peryferyjne |
Licznik w czasie rzeczywistym z oddzielnym oscylatorem |
|
Programowalny timer nadzorujący z osobnym na chipie
Oscylator |
|
|
Komparator analogowy na chipie |
|
|
Przerwanie i przebudzenie na zmianie pinów |
|
|
Inne specjalne funkcje |
Resetowanie zasilania i programowalne wykrywanie brązowego |
|
Wewnętrzny skalibrowany oscylator |
|
|
Zewnętrzne i wewnętrzne źródła przerwań |
|
|
Tryby snu |
Sześć trybów: bezczynność, redukcja szumów ADC, zasilanie, zasilanie,
W dół, w trybie gotowości, rozszerzone gotowości |
Zastosowania
Mikrokontroler ATMEGA2560, obchodzony ze względu na wyjątkowe możliwości wydajności, służy jako podstawa wielu współczesnych zastosowań technologicznych.Jego szerokie przyjęcie jest napędzane jego zdolnością adaptacyjną i niezawodnością w wielu projektach, skutecznie rozwiązując złożone potrzeby systemu z niezwykłą precyzją.
Innowacje drukowania 3D
W branży drukowania 3D ATMEGA2560 odgrywa kluczową rolę w zarządzaniu ruchem drukarek i zapewnianiu skrupulatnego umieszczenia każdej warstwy.Jego wyrafinowana moc przetwarzania zarządza skomplikowanymi algorytmami, gwarantującym wyniki wysokiej jakości.Poprzez precyzyjnie koordynując działania motoryczne i wydawanie filamentów, znacznie zwiększa rozdzielczość drukowania i dokładność.Często możesz wykorzystać obszerne piny we/wy mikrokontrolera, aby podłączyć szereg czujników i sterowników silnika, umożliwiając szczegółowe ruchy.Doświadczenia pokazują, że optymalizacje dostosowanych do oprogramowania dla określonych drukarek 3D mogą w szczególności podnieść jakość druku i skrócić czas produkcji, podkreślając elastyczny charakter mikrokontrolera.
Kontrola silnika
ATMEGA2560 znajduje powszechną aplikację w systemach sterowania silnikami, ułatwiając wykonywanie złożonych algorytmów sterowania w celu niezawodnej wydajności silnika.Zapewnia wydajną regulację prędkości i kontrolę kierunku, co jest szczególnie korzystne w systemach robotycznych i przemysłowych wymagających dokładnej precyzji operacyjnej.W praktyce integracja czujników sprzężenia zwrotnego z ATMEGA2560 poprawia wydajność poprzez ciągłą aktualizację parametrów operacyjnych.Często możesz podkreślić wartość testowania i kalibracji iteracyjnej, aby uzyskać lepszą kontrolę silnika, co prowadzi do zwiększonej wydajności i niezawodności systemu.
Interfejs czujników
W przypadku interfejsu czujników mikrokontroler stanowi podstawę do integracji różnorodnych czujników analogowych i cyfrowych, przetwarzania ich danych w celu zapewnienia możliwych do spostrzeżeń.Ta zdolność jest aktywna w systemach, w których gromadzenie i monitorowanie danych środowiskowych jest ostateczne, na przykład w stacjach pogodowych i inteligentnych miastach.Możesz podkreślić zalety rafinacji technik akwizycji danych i algorytmów przetwarzania sygnałów w celu zwiększenia wiarygodności odczytów czujników.Te wyrafinowane podejścia przyczyniają się do rozwoju bardziej kompetentnych i responsywnych systemów monitorowania.
Kompleksowe wykrywanie temperatury
W systemach wykrywania temperatury ATMEGA2560 wyróżnia się, zarządzając licznymi wejściami czujników jednocześnie, obsługując rozległe rzeczywiste monitorowanie termiczne.Jego solidna zdolność przetwarzania gwarantuje dokładne odczyty temperatury, stosowane do zastosowań w systemach kontroli klimatu i bezpieczeństwa.Wdrożenie nadmiarowych ścieżek wykrywania często zaleca się zwiększenie niezawodności systemu, co jest praktyką głównie korzystną w środowiskach, w których stosuje się stabilność temperatury.To ilustruje równowagę między innowacyjną inżynierią a praktyczną niezawodnością.
Inteligentne implementacje domu i IoT
W dziedzinie automatyzacji domów i systemów IoT ATMEGA2560 upoważnia zaawansowane funkcje, od regulacji świateł i urządzeń po umożliwienie wyrafinowanych rozwiązań bezpieczeństwa domowego.Jego funkcje łączności zapewniają płynną integrację z asortowanymi protokołami komunikacyjnymi, wspierając spójny ekosystem.Możesz poprzeć eksplorację systemów hybrydowych, które wykorzystują technologie przewodowe, jak i bezprzewodowe, aby osiągnąć optymalną równowagę wydajności i niezawodności.Ta integracja często powoduje doskonałe doświadczenia i bardziej inteligentne przestrzenie mieszkalne.
Alternatywy
• • ATMEGA128
• • ATMEGA88
Schematyczny
Pakiet
Producent
Microchip Technology Inc., położony w żywych miejscach Chandler w Arizonie, stanowi uznany globalnie twórca najnowocześniejszych rozwiązań mikrokontrolera.Niezachwiane dążenie firmy do innowacji i niezawodności wyrzeźbiło ją w godne uwagi miejsce w konkurencyjnej branży elektronicznej.
Mikrokontrolery, zilustrowane przez Microchip's ATMEGA2560, są dziś podstawowe w ramach niezliczonych elektronicznych gadżetów.Zastosowane w szerokiej gamie urządzeń, ich zastosowania obejmują podstawową elektronikę użytkową po skomplikowane systemy przemysłowe.Ta zdolność adaptacyjna jest świadectwem ich wpływu, ponieważ odgrywają główną rolę w kształtowaniu wydajności, wydajności i wzorców zużycia energii.
Arkusz danych pdf
ATMEGA2560-16au Arkusze danych:
O nas
ALLELCO LIMITED
Czytaj więcej
Szybkie zapytanie.
Proszę wysłać zapytanie, natychmiast odpowiemy.
Często Zadawane Pytania [FAQ]
1. Czy Arduino używa ATMEGA2560?
Arduino Mega 2560, napędzany mikrokontrolerem ATMEGA2560, wyróżnia się jego zdolnością do zarządzania skomplikowanymi operacjami, w dużej mierze ułatwionymi przez jego obfite szpilki we/wy i znaczną pamięć szkicową.Atrybuty te oferują znaczne korzyści dla przedsięwzięć, takich jak drukowanie 3D i wyrafinowana robotyka.Można uznać, że możliwość adaptacji jest przydatna w rozszerzaniu możliwości projektu.Wielu podkreśla, w jaki sposób obszerne piny i zdolność przetwarzania pozwalają na jednoczesną koordynację danych i integrację peryferyjną, co zwiększa złożoność i zasięg złożonych projektów.
2. Czy istnieje wersja dipu ATMEGA2560?
Wersja pakietu DIP dla ATMEGA2560 nie istnieje, przy czym ATMEGA1284 jest najbliższym substytutem pod względem pojemności pamięci.Jednak nie ma to w pinach we/wy i portach szeregowych, popychając rozważanie w kierunku kompromisów między wielkością a szerokością operacyjną.Poruszając się po tym terenie, możesz wybrać technologię montowania powierzchni, aby uwzględnić obszerne wymagania we/wy, pomimo wyzwań związanych z montażem i naprawą.
3. Jak spalić bootloader do Arduino ATMEGA2560?
Konfigurowanie bootloadera na ATMEGA2560 wymaga określonych narzędzi, takich jak USBTINISP i wyraźnej procedury dostępnej za pośrednictwem Arduino IDE.Opanowanie tej techniki jest przydatne do uwolnienia pełnych możliwości mikrokontrolera, umożliwiające spersonalizowane instalacje oprogramowania układowego i szczytowe wydajność.Często możesz zauważyć, że niezawodna metoda instalacji bootloadera znacznie wzmacnia spójność rozwoju i triumf projektu.
4. Jaki jest najlepszy programista ATMEGA2560?
Atmel-Ice wyróżnia się jako preferowane narzędzie do programowania i debugowania mikrokontrolerów ATMEGA2560, chwalonych za szeroką kompatybilność z urządzeniami Arm® Cortex®-M i AVR.Jego siła polega na jego zdolności do skutecznego radzenia sobie z różnorodnymi zadaniami debugowania, ułatwiając w ten sposób przepływ pracy.Wiesz, że posiadanie programisty o wysokim kalibru, takim jak Atmel-Ice, może zwiększyć skuteczność debugowania, pozytywnie wpływając na harmonogramy projektów.

TMC2208 vs. TMC2209: Który sterownik Stepper jest dla Ciebie odpowiedni?
na 2024/11/13

Moduł Bluetooth HC-06: Aplikacje, połączenie Arduino i specyfikacje
na 2024/11/12
Popularne posty
-
Co to jest GND w obwodzie?
na 1970/01/1 3162
-

Podręcznik złącza RJ-45: Kody kolorów złącza RJ-45, schematy okablowania, aplikacje R-J45, arkusze danych RJ-45
na 1970/01/1 2737
-
Zrozumienie napięć zasilania w elektronice VCC, VDD, VEE, VSS i GND
na 0400/11/17 2353
-

Rodzaje złącza światłowodowego: SC vs LC i LC vs MTP
na 1970/01/1 2214
-

Porównanie DB9 i RS232
na 1970/01/1 1832
-

Co to jest bateria LR44?
Energia elektryczna, ta wszechobecna siła, cicho przenika każdy aspekt naszego codziennego życia, od trywialnych gadżetów po zagrażające życiu sprzęt medyczny, odgrywa cichą rolę.Jednak naprawdę chwytanie tej energii, zwłaszcza sposobu jej przechowywania i wydajności, nie jest łatwym zadaniem.Na tym tle ten artykuł skupi się na rodzaju akumulatora monety, który może wydawać si...na 1970/01/1 1805
-
Zrozumienie podstaw: odporność na indukcyjność i nakładanie
W skomplikowanym tańcu inżynierii elektrycznej trio podstawowych elementów zajmuje centralne miejsce: indukcyjność, opór i pojemność.Każda z nich ma unikalne cechy, które dyktują dynamiczne rytmy obwodów elektronicznych.Tutaj wyruszamy w podróż, aby rozszyfrować złożoność tych komponentów, aby odkryć ich wyraźne role i praktyczne zastosowania w rozległej orkiestrze elektrycz...na 1970/01/1 1759
-

CR2430 Kompleksowy Przewodnik po baterii: Specyfikacje, aplikacje i porównanie z akumulatorami CR2032
Co to jest bateria CR2430?Korzyści z baterii CR2430NormaZastosowania baterii CR2430CR2430 równoważnyCR2430 vs CR2032Bateria CR2430 RozmiarCzego szukać przy zakupie CR2430 i równoważnikówArkusz danych pdfCzęsto zadawane pytania Baterie są sercem małych urządzeń elektronicznych.Spośród wielu dostępnych rodzajów komórki monety odgrywają kluczową rolę, powszechnie występującą w ...na 1970/01/1 1724
-
Co to jest RF i dlaczego go używamy?
Technologia częstotliwości radiowej (RF) jest kluczową częścią nowoczesnej komunikacji bezprzewodowej, umożliwiając transmisję danych na duże odległości bez fizycznych połączeń.Ten artykuł zagłębia się w podstawy RF, wyjaśniając, w jaki sposób promieniowanie elektromagnetyczne (EMR) umożliwia komunikację RF.Zbadamy zasady EMR, tworzenia i kontroli sygnałów RF oraz ich sze...na 1970/01/1 1713
-
Kompleksowy przewodnik po HFE w tranzystorach
Tranzystory są kluczowymi komponentami w nowoczesnych urządzeniach elektronicznych, umożliwiając wzmocnienie sygnału i kontrolę.W tym artykule zagłębiono się w wiedzę wokół HFE, w tym jak wybrać wartość HFE tranzystora, jak znaleźć HFE i wzmocnienie różnych rodzajów tranzystorów.Dzięki naszej eksploracji HFE zyskujemy głębsze zrozumienie działania tranzystorów i ich roli ...na 5600/11/17 1682
Gorący numer części
-

TMP125AIDBVR
Texas Instruments
SENSOR DIGITAL -40C-125C SOT23-6
DX07S024JJ2R1300
JAE Electronics
CONN RCP USB3.1 TYPEC 24P SMD RA
HCPL2631SM
onsemi
OPTOISO 5KV 2CH OPEN COLL 8SMD
LT1997IDF-3#PBF
Analog Devices Inc.
IC OPAMP GP 1 CIRCUIT 14DFN
ISL9R460P2
onsemi
DIODE GEN PURP 600V 4A TO220-2
S-875077CUP-ACFT2G
ABLIC Inc.
IC REG VOLT DET 1OUT SOT89-5
MMBTA42Q-7-F
Diodes Incorporated
SS HI VOLTAGE TRANSISTOR SOT23 T
MAX6133BASA50+
Analog Devices Inc./Maxim Integrated
IC VREF SERIES 5V 8SOIC
PCA8575BQ,118
NXP USA Inc.
IC XPNDR 400KHZ I2C 24DHVQFN
VI-LU0-CV
Vicor Corporation
AC/DC CONVERTER 5V 150W
AD5535ABC
Analog Devices Inc.
IC DAC 14BIT 32CHAN 124CSPBGA
HX2326FNLT
Pulse Electronics
PULSE XFMR 1CT:1CT TX/RX
AD8137YCPZ-REEL
Analog Devices Inc.
IC OPAMP DIFF 1 CIRCUIT 8LFCSP
BLM15AG221SH1D
Murata Electronics
FERRITE BEAD 220 OHM 0402 1LN
MAX14913EVKIT#
Analog Devices Inc./Maxim Integrated
EV KIT FOR MAX14913
INA219BIDCNT
Texas Instruments
IC CURRENT MONITOR 0.5% SOT23-8
UMK105CG151JVHF
Taiyo Yuden
CAP CER 150PF 50V C0G/NP0 0402
S912ZVH128F2CLQ
NXP USA Inc.
IC MCU 16BIT 128KB FLASH 144LQFP -

SMDJ18CA
Littelfuse Inc.
TVS DIODE 18VWM 29.2VC DO214AB
PE-53932SNL
Pulse Electronics
FIXED IND 37UH 2.24A 100MOHM SMD
4N46-300E
Broadcom Limited
OPTOISO 3.75KV DARL W/BASE 6SMD
DS1100Z-150+
Analog Devices Inc./Maxim Integrated
IC DELAY LINE 5TAP 150NS 8SOIC
PI49FCT3805BQEX
Diodes Incorporated
IC CLK BUFFER 1:5 80MHZ 20QSOP
LM2575T-3.3
onsemi
IC REG BUCK 3.3V TO220-5
170M4215
Eaton - Bussmann Electrical Division
FUSE SQUARE 550A 700VAC RECT
AN2135SC
Infineon Technologies
IC MCU 8051 8K RAM 24MHZ 44QFP
B180BE-13
Diodes Incorporated
DIODE SCHOTTKY 80V 1A SMB
UCD32C03L01
YAGEO
TVS ESD, SOD-323, 3.3V, 13V, REE
TSM3457CX6
Taiwan Semiconductor Corporation
-30V, -5A, SINGLE P-CHANNEL POWE
LM8500IMT9
Texas Instruments
CONSUMER CIRCUIT, PDSO48
12105C334J4Z2A
KYOCERA AVX
CAP CER 0.33UF 50V X7R 1210
FGH60N60SMD
onsemi
IGBT FIELD STOP 600V 120A TO247
LTC2844CG#PBF
Linear Technology
LTC2844 - 3.3V SOFTWARE-SELECTAB
RJK03P1DPA-00#J5A
Renesas Electronics America Inc
N-CHANNEL POWER MOSFET
EMF5T2R
Rohm Semiconductor
TRANS NPN PREBIAS/PNP 0.15W EMT6
NB2762ASNR2
onsemi
IC CLK/FREQ SYNTH 6TSOP -
2SK4150TZ-E
Renesas
2SK4150TZ - N-CHANNEL POWER MOSF
470KD10
YAGEO
MOV
RT0805BRE0736KL
YAGEO
RES SMD 36K OHM 0.1% 1/8W 0805
EP2S90F1020C4
Intel
IC FPGA 758 I/O 1020FBGA
CC0603ZRY5V6BB475
YAGEO
CAP CER 4.7UF 10V Y5V 0603
800A150JT250XT
American Technical Ceramics
CAP CER 15PF 250V C0G/NP0 0505
FDH5500
onsemi
MOSFET N-CH 55V 75A TO247-3
GRM0335C1H7R0DD01J
Murata Electronics
CAP CER 7PF 50V C0G/NP0 0201
FAN3182BMX
onsemi
IC LOW SIDE SWITCH 8SOIC
TMF325B7225KMHP
Taiyo Yuden
CAP CER 2.2UF 25V X7R 1210
LTC2916HTS8-1#TRPBF
Analog Devices Inc.
IC SUPERVISOR 1 CHANNEL TSOT23-8
TC1016-2.7VLTTR
Microchip Technology
IC REG LINEAR 2.7V 80MA SC70-5
HSMS-2862-BLKG
Broadcom Limited
RF DIODE SCHOTTKY 4V SOT23-3
VI-2TL-IY
Vicor Corporation
DC DC CONVERTER 28V 50W
0312004.MXP
Littelfuse Inc.
FUSE GLASS 4A 250VAC 3AB 3AG
TPS22969DNYR
Texas Instruments
IC PWR SWITCH N-CHAN 1:1 8WSON
SMAJ45A
Meritek
TVS DIODE 45VWM 72.7VC
CLVCC4245AMPWREPG4
Texas Instruments
IC TRANSLATOR BIDIR 24TSSOP