Przewodnik po użyciu PIC16F877A do projektów silnikowych krokowych
Mikrokontroler PIC16F877A jest szeroko stosowany w wielu projektach elektronicznych, ponieważ oferuje dobrą równowagę funkcji i łatwości użytkowania.W tym przewodniku przyjrzymy się blisko PIC16F877A, pokrywając wszystko, od jego modeli pinout i CAD po jego zastosowanie w kontrolowaniu silników krokowych.Niezależnie od tego, czy budujesz proste urządzenie, czy złożony projekt automatyzacji, zrozumienie, jak łączyć i sterować silnikami za pomocą tego mikrokontrolera, pomoże Ci uzyskać najlepsze wyniki.
Katalog

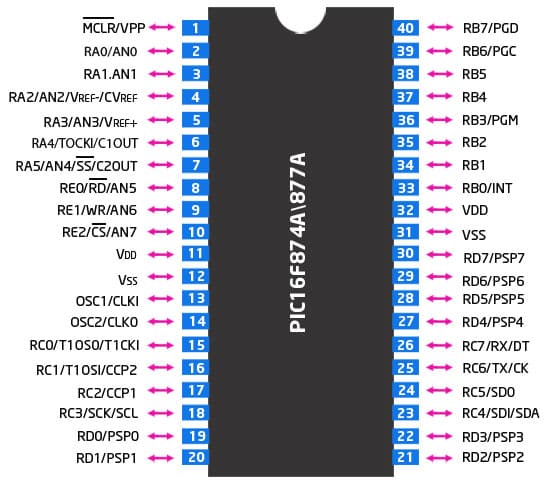
PIC16F877A Konfiguracja PIN
Modele CAD dla PIC16F877A
PIC16F877A SYMAM Symbol
PIC16F877A STOPRINT PCB

Model 3D
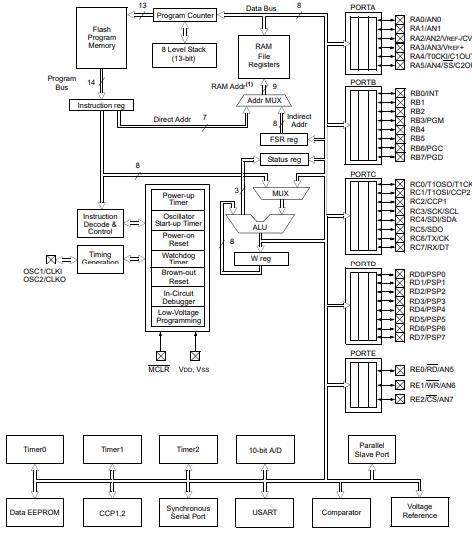
PIC16F877A Struktura wewnętrzna
Szczegółowe specyfikacje techniczne
| Typ | Parametr |
| Czas realizacji fabryki | 7 tygodni |
| Uchwyt | Przez dziurę |
| Typ montażu | Przez dziurę |
| Pakiet / obudowa | 40-dip (0,600, 15,24 mm) |
| Liczba szpilek | 40 |
| Konwertery danych | A/D 8x10B |
| Liczba I/OS | 33 |
| Timery strażnicze | Tak |
| Temperatura robocza | -40°C ~ 85°C ta |
| Opakowanie | Rura |
| Szereg | Zdjęcie® 16f |
| Opublikowany | 1997 |
| Kod JESD-609 | E3 |
| Kod PBFree | Tak |
| Status części | Aktywny |
| Poziom wrażliwości na wilgoć (MSL) | 1 (nieograniczony) |
| Liczba terminów | 40 |
| Kod ECCN | Ear99 |
| Końcowe wykończenie | Matowa cyna (SN) - wyżarzona |
| Dodatkowa funkcja | Działa przy minimalnej dostawie 4 V |
| Pozycja końcowa | PODWÓJNY |
| Napięcie zasilania | 5v |
| Częstotliwość | 20 MHz |
| Podstawowy numer części | PIC16F877A |
| Liczba pinów | 40 |
| Napięcie zasilania (VSUP) | 5.5 V. |
| Zasilacze | 5v |
| Napięcie zasilania min (VSUP) | 4,5 V. |
| Interfejs | I2C, SPI, SSP, UART, USART |
| Rozmiar pamięci | 14KB |
| Typ oscylatora | Zewnętrzny |
| Nominalny prąd zaopatrzenia | 1,6 mA |
| Rozmiar pamięci RAM | 368 x 8 |
| Napięcie - zasilanie (VCC/VDD) | 4v ~ 5,5 V. |
| UPS/UCS/peryferyjny typ ICS | Microcontroller, RISC |
| Podstawowy procesor | Zdjęcie |
| Peryferyjne | Brązowy wykrycie/reset, POR, PWM, WDT |
| Typ pamięci programu | BŁYSK |
| Rozmiar rdzenia | 8-bit |
| Rozmiar pamięci programu | 14KB (8k x 14) |
| Łączność | I2C, SPI, UART/USART |
| Rozmiar bitu | 8 |
| Czas dostępu | 20 µS |
| Ma ADC | Tak |
| Kanały DMA | NIE |
| Szerokość magistrali danych | 8b |
| Liczba liczników/liczników | 3 |
| Adres szerokość autobusu | 8b |
| Gęstość | 112 kb |
| Rozmiar EEPROM | 256 x 8 |
| Rodzina procesora | Zdjęcie |
| Liczba kanałów ADC | 8 |
| Liczba kanałów PWM | 2 |
| Liczba kanałów I2C | 1 |
| Wysokość | 4,06 mm |
| Długość | 52,45 mm |
| Szerokość | 14,22 mm |
| Dotrzyj do SVHC | Brak SVHC |
| Hartowanie promieniowania | NIE |
| Status Rohs | ROHS3 zgodne |
| Ołów za darmo | Ołów za darmo |
Zrozumienie silników krokowych
Silnik krokowy to rodzaj silnika elektrycznego, który porusza się w określonych krokach, a nie w ciągłym ruchu, takim jak tradycyjne silniki.Te ruchy krok po kroku są mierzone w stopniach, które mogą się różnić w zależności od zastosowania.
Silniki krokowe mogą działać w różnych trybach: napęd fali, pełny napęd i pół napędu.Każdy tryb kontroluje, w jaki sposób fazy silnika są energetyzowane, wpływając na jego wydajność i dzięki czemu nadaje się do różnych zastosowań.
W trybie napędu fali tylko jedna faza silnika jest napędzana jednocześnie.Ten prosty tryb sterowania jest przydatny w sytuacjach, w których wydajność energetyczna jest priorytetowo traktowana przez moment obrotowy, na przykład w podstawowych zadaniach automatyzacji, w których potrzebny jest minimalny prąd rozruchowy.
Tryb pełnego napędu zasila dwie fazy jednocześnie.Powoduje to wyższy wynik momentu obrotowego, ponieważ dwie cewki współpracują ze sobą, co czyni ją idealną do zastosowań, w których potrzebna jest precyzja i wytrzymałość, na przykład w robotyce i maszynach CNC.
Tryb połowy napędu łączy cechy fali i pełnego napędu poprzez naprzemiennie energetyzując jedną fazę i dwie fazy.Takie podejście zapewnia mniejsze wielkości kroków, skutecznie podwajając rozdzielczość silnika.Pół Drive najlepiej nadaje się do aplikacji takich jak drukowanie 3D i drobne oprzyrządowanie, w których niezbędne są płynne ruch i precyzyjne pozycjonowanie.
Wybierając silnik krokowy do określonego zastosowania, rozważ środowisko operacyjne.W przypadku zadań precyzyjnych zaleca się, aby tryb połowy napędu w celu zapewnienia płynnych przejść i zmniejszonych wibracji.W przypadku projektów koncentrujących się na oszczędnościach energii tryb napędu WAVE może być bardziej odpowiedni.
Wybór odpowiedniego trybu wymaga równoważenia, takich jak moment obrotowy, prędkość i złożoność systemu.Wybór właściwego trybu może znacząco wpłynąć na wydajność silnika i ogólną wydajność systemu.
Łączenie silnika krokowego z PIC16F877A
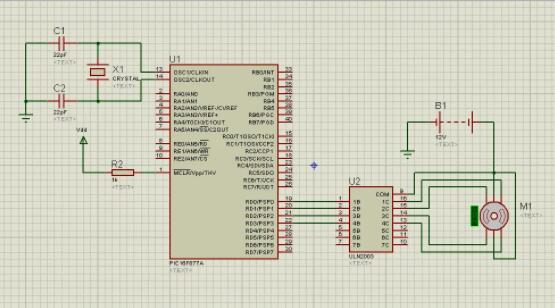
Aby podłączyć silnik krokowy z PIC16F877A Microcontroller, możesz użyć tablicy tranzystorowej ULN2003.Ten zintegrowany obwód, zaprojektowany dla silników o wysokiej zgrynie, zawiera siedem par Darlington.Dolne bity portu mikrokontrolera są połączone z pinami wejściowymi (1B, 2B, 3B, 4B) ULN2003, a jego piny wyjściowe (1C, 2C, 3C, 4C) łączą się z pinami silnika Stepper.Wspólne szpilki silnika i COM PIN ULN2003 są podłączone do zasilania 12V.
Silniki krokowe są powszechnie używane do zastosowań, które wymagają precyzyjnej kontroli ruchu.Konwertują cyfrowe impulsy na rotację mechaniczną, dzięki czemu są idealne do urządzeń takich jak maszyny CNC i drukarki 3D, w których pozycja i prędkość muszą być starannie regulowane.
ULN2003 odgrywa kluczową rolę w kontrolowaniu silników krokowych ze względu na jego zdolność do obsługi wysokiego prądu i łatwe interfejsy z mikrokontrolerami.Po podłączeniu do PIC16F877A dolne bity portu służą do sterowania silnikiem krokowym.Ta konfiguracja zapewnia precyzyjną kontrolę kroku, zapewniając dokładny ruch i pozycjonowanie.
Korzystanie z ULN2003 w konfiguracjach sterowania silnikiem jest wysoce niezawodne w aplikacjach w świecie rzeczywistym.Pomaga zminimalizować problemy, takie jak pominięte kroki lub nieprawidłowe pozycjonowanie, poprawiając ogólną wydajność.Regularna konserwacja i kalibracja na podstawie danych użytkowania może dodatkowo zoptymalizować funkcję motoryczną, zapewniając długoterminową stabilność i precyzyjne działanie.
Regulacja prędkości silnika krokowego
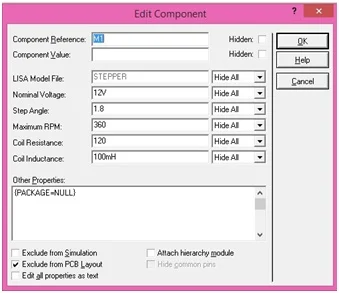
Prędkość silnika krokowego można dokładnie zmodyfikować przy użyciu oprogramowania do symulacji Proteus.Uzyskując dostęp do ustawień silnika poprzez „Edytuj właściwości”, można dokonać regulacji parametrów, takich jak liczba kroków i kąt kroku.Na przykład 200-etapowy silnik dzieli pełny obrót (360 °) na 200 kroków, co czyni każdy krok 1,8 °.Zmiana tych ustawień w proteusie będzie dynamicznie odzwierciedlać podczas symulacji.
W praktyce silniki krokowe są często stosowane w branżach, w których precyzyjna kontrola ruchu ma kluczowe znaczenie, na przykład w maszynach i robotyce CNC.Dostosowanie kąta kroku i liczby kroków dopracowuje silnik, aby osiągnąć dokładny ruch wymagany dla określonych zadań.
Zmiana parametrów silnika krokowego wpływa na charakterystykę wydajności, takie jak moment obrotowy i rozdzielczość.Na przykład zwiększenie liczby kroków ogólnie zwiększa rozdzielczość, ale może wpływać na moment obrotowy i reakcję.Zrozumienie tych kompromisów poprzez symulację pomaga w podejmowaniu świadomych decyzji.
Niuansowa perspektywa ujawnia, że korekty iteracyjne, a następnie praktyczne próby, prowadzą do bardziej solidnego projektu silnika.Krytyczne jest zapewnienie, że cyfrowe symulacje odzwierciedlają rzeczywiste wyniki.Nuansje konfigurowania silnika krokowego rzeczywiście leżą równowaga między teoretyczną precyzją a praktyczną wykonalności.
Programowanie silnika krokowego z PIC16F877A
W tej sekcji obejmuje sposób zaprogramowania silnika krokowego za pomocą mikrokontrolera PIC16F877A, wyjaśniając różne tryby jazdy i zapewniając praktyczne wskazówki dotyczące skutecznego wdrażania.
Oto podstawowy przykładowy kod do zademonstrowania sterowania silnikiem krokowym za pomocą trybu pełnego napędu:
void main ()
{
Trisd = 0B00000000;// Ustaw Portd jako wyjście
Portd = 0b11111111;// Zainicjuj Portd
Do
{
Portd = 0b00000011;// Energia dwie fazy jednocześnie
Delay_ms (500);// 0,5-sekundowe opóźnienie
Portd = 0b00000110;
Delay_ms (500);
Portd = 0b00001100;
Delay_ms (500);
Portd = 0b00001001;
Delay_ms (500);
} while (1);// pętla na czas nieokreślony
}
W tym kodzie portd PIC16F877A jest skonfigurowany jako port wyjściowy do sterowania silnikiem krokowym przez sterownik ULN2003.Sekwencja poleceń energetyzuje dwie fazy silnika krokowego jednocześnie, co jest charakterystyczne dla trybu pełnego napędu.Ten tryb utrzymuje wirnik w ustalonej pozycji z maksymalnym momentem obrotowym, ale zazwyczaj zużywa większą moc.
Tryb pełnego napędu nie jest jedynym sposobem kontrolowania silników krokowych.Tryby Wave Drive i Half Drive zapewniają alternatywy w oparciu o określone wymagania.Napęd fali energetyzuje tylko jedną fazę na raz, co zmniejsza zużycie energii, ale powoduje niższy moment obrotowy.Połowa jazdy naprzemiennie między jedną i dwiema fazami, oferując wyższą rozdzielczość i gładszy ruch.
Podczas programowania silników krokowych wybierz tryb jazdy, który najlepiej odpowiada Twoim potrzebom, niezależnie od tego, czy jest to precyzyjne pozycjonowanie, wydajność energetyczną czy maksymalny moment obrotowy.
Praktyczne zastosowania silników krokowych
Silniki krokowe są szeroko stosowane w wielu branżach ze względu na ich zdolność do zapewnienia precyzyjnej kontroli i niezawodnej wydajności.Ich wszechstronność sprawia, że nadają się do wszystkiego, od samochodów i urządzeń gospodarstwa domowego po maszyny przemysłowe i urządzenia medyczne.
W świecie motoryzacyjnym silniki Stepper odgrywają kluczową rolę w kontrolowaniu systemów, takich jak przepustnica, reflektory i klimatyzacja.Pomagają dostroić te komponenty, upewniając się, że pojazdy działają płynnie i wydajnie.Tymczasem w urządzeniach biurowych, takich jak drukarki i kserokopie, silniki stepowe obsługują zadania, takie jak karmienie papieru i umieszczanie atramentu.Ta precyzja zapewnia stałą jakość drukowania i płynne działanie w czasie.
W domu urządzenia takie jak pralki i zmywarki do naczyń opierają się na silnikach krokowych w celu kontrolowania przepływu wody i obrotu bębna, zapewniając bezproblemowo wszystko.W ustawieniach przemysłowych silniki krokowe mają kluczowe znaczenie dla obsługi maszyn CNC i ramion robotycznych, gdzie zapewniają dokładne ruchy potrzebne do produkcji bardzo precyzyjnych.
Systemy bezpieczeństwa korzystają również z niezawodnego ruchu silników krokowych.W urządzeniach takich jak kamery monitorujące i zautomatyzowane zamki, silniki krokowe umożliwiają gładkie i dokładne pozycjonowanie, co jest niezbędne do skutecznego monitorowania i bezpieczeństwa.W opiece zdrowotnej silniki krokowe są stosowane w urządzeniach medycznych, takich jak pompy infuzyjne i sprzęt do obrazowania, gdzie oferują precyzyjną kontrolę niezbędną do bezpiecznego i dokładnego działania.
W miarę ewolucji technologii, silniki krokowe powinny znaleźć jeszcze więcej zastosowań w pojawiających się dziedzinach, takich jak robotyka i pojazdy autonomiczne.Ich ciągły rozwój prawdopodobnie doprowadzi do jeszcze większej precyzji i wydajności, zwiększając ich rolę w różnych branżach.
Porównywalne części mikrokontrolera
| Numer części | PIC16F877A-I/P. | PIC16F77-I/P. | PIC16F74-I/P. | PIC16F777-I/P. |
| Producent | Technologia mikroczipów | Technologia mikroczipów | Technologia mikroczipów | Technologia mikroczipów |
| Pakiet / obudowa | 40-dip (0,600, 15,24 mm) | 40-dip (0,600, 15,24 mm) | 40-dip (0,600, 15,24 mm) | 40-dip (0,600, 15,24 mm) |
| Liczba szpilek | 40 | 40 | 40 | 40 |
| Szerokość magistrali danych | 8 b | 8 b | 8 b | 8 b |
| Liczba we/wy | 33 | 33 | 33 | 36 |
| Interfejs | I2C, SPI, SSP, UART, USART | I2C, SPI, SSP, UART, USART | I2C, SPI, SSP, UART, USART | I2C, SPI, UART, USART |
| Rozmiar pamięci | 14 kb | 7 kb | 14 kb | 14 kb |
| Napięcie zasilania | 5 v | 5 v | 5 v | 5 v |
| Peryferyjne | Brązowy wykrycie/reset, POR, PWM, WDT | Brązowy wykrycie/reset, POR, PWM, WDT | Brązowy wykrycie/reset, POR, PWM, WDT | Brązowy wykrycie/reset, POR, PWM, WDT |
| Zobacz porównaj | PIC16F877A-I/P. Vs. PIC16F77-I/P. | PIC16F877A-I/P. Vs. PIC16F77-I/P. | PIC16F877A-I/P. Vs. PIC16F74-I/P. | PIC16F877A-I/P. Vs. PIC16F777-I/P. |
Często zadawane pytania [FAQ]
1. Co wykorzystuje silnik stepowy do generowania ruchu mechanicznego?
Silnik krokowy generuje ruch mechaniczny za pomocą impulsów elektrycznych.
2. Co robi silnik stepowy?
Silnik krokowy porusza się w dyskretnych krokach.
3. Jak mierzone są silniki krokowe?
Silniki krokowe są mierzone w stopniach.
4. Ile kroków robi silnik stepowy?
Silnik krokowy porusza się po kroku.
5. Ile trybów wzbudzenia ma silnik krokowy?
Silnik krokowy ma trzy tryby wzbudzenia.
6. Jaki jest najprostszy sposób na podłączenie silnika krokowego?
Najprostszym sposobem jest podłączenie go do mikrokontrolera PIC16F877A.
7. Ile pinów wejściowych ULN2003 jest podłączonych do najniższych znaczących kawałków portu mikrokontrolera?
Cztery piny wejściowe są podłączone do najniższych znaczących bitów portu mikrokontrolera
O nas
ALLELCO LIMITED
Czytaj więcej
Szybkie zapytanie.
Proszę wysłać zapytanie, natychmiast odpowiemy.
Dlaczego warto wybrać układ pamięci Adesto RM25C64DS-LTAI-B dla swojego projektu?
na 2024/10/10
PC817 OptoCupler: Funkcjonalność i nowoczesne aplikacje
na 2024/10/10
Popularne posty
-
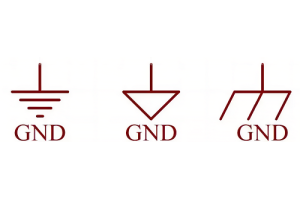
Co to jest GND w obwodzie?
na 1970/01/1 2832
-

Podręcznik złącza RJ-45: Kody kolorów złącza RJ-45, schematy okablowania, aplikacje R-J45, arkusze danych RJ-45
na 1970/01/1 2403
-

Rodzaje złącza światłowodowego: SC vs LC i LC vs MTP
na 1970/01/1 2010
-
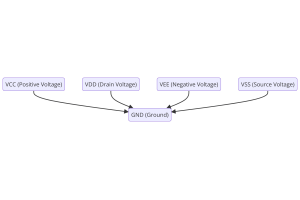
Zrozumienie napięć zasilania w elektronice VCC, VDD, VEE, VSS i GND
na 0400/11/5 1760
-

Porównanie DB9 i RS232
na 1970/01/1 1724
-

Co to jest bateria LR44?
Energia elektryczna, ta wszechobecna siła, cicho przenika każdy aspekt naszego codziennego życia, od trywialnych gadżetów po zagrażające życiu sprzęt medyczny, odgrywa cichą rolę.Jednak naprawdę chwytanie tej energii, zwłaszcza sposobu jej przechowywania i wydajności, nie jest łatwym zadaniem.Na tym tle ten artykuł skupi się na rodzaju akumulatora monety, który może wydawać si...na 1970/01/1 1677
-
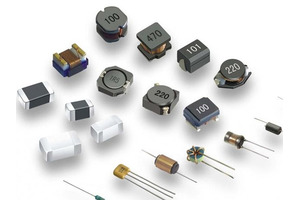
Zrozumienie podstaw: odporność na indukcyjność i nakładanie
W skomplikowanym tańcu inżynierii elektrycznej trio podstawowych elementów zajmuje centralne miejsce: indukcyjność, opór i pojemność.Każda z nich ma unikalne cechy, które dyktują dynamiczne rytmy obwodów elektronicznych.Tutaj wyruszamy w podróż, aby rozszyfrować złożoność tych komponentów, aby odkryć ich wyraźne role i praktyczne zastosowania w rozległej orkiestrze elektrycz...na 1970/01/1 1615
-

CR2430 Kompleksowy Przewodnik po baterii: Specyfikacje, aplikacje i porównanie z akumulatorami CR2032
Co to jest bateria CR2430?Korzyści z baterii CR2430NormaZastosowania baterii CR2430CR2430 równoważnyCR2430 vs CR2032Bateria CR2430 RozmiarCzego szukać przy zakupie CR2430 i równoważnikówArkusz danych pdfCzęsto zadawane pytania Baterie są sercem małych urządzeń elektronicznych.Spośród wielu dostępnych rodzajów komórki monety odgrywają kluczową rolę, powszechnie występującą w ...na 1970/01/1 1495
-

CR2450 vs CR2032: Czy zamiast tego można użyć baterii?
Akumulatory litowe manganu mają pewne podobieństwa z innymi akumulatorami litowymi.Wysoka gęstość energii i długa żywotność służby są wspólnymi cechami.Ten rodzaj baterii zdobył zaufanie i przychylność wielu konsumentów ze względu na jej wyjątkowe bezpieczeństwo.Drogie gadżety technologiczne?Małe urządzenia w naszych domach?Rozejrzyj się, a zobaczysz je wszędzie.Spośród ...na 1970/01/1 1469
-
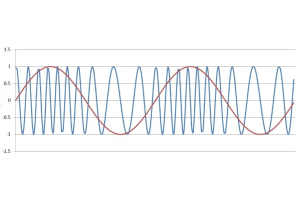
Co to jest RF i dlaczego go używamy?
Technologia częstotliwości radiowej (RF) jest kluczową częścią nowoczesnej komunikacji bezprzewodowej, umożliwiając transmisję danych na duże odległości bez fizycznych połączeń.Ten artykuł zagłębia się w podstawy RF, wyjaśniając, w jaki sposób promieniowanie elektromagnetyczne (EMR) umożliwia komunikację RF.Zbadamy zasady EMR, tworzenia i kontroli sygnałów RF oraz ich sze...na 1970/01/1 1441
Gorący numer części
-
C4532X7R2E334M230KA
TDK Corporation
CAP CER 0.33UF 250V X7R 1812
0977.800MXEP
Littelfuse Inc.
FUSE CERAMIC 800MA 500VAC 450VDC
PC123X2YIP0F
Sharp Microelectronics
OPTOISOLATOR 5KV TRANS 4SMD
NRF24AP2-USBQ32-R7
Nordic Semiconductor ASA
IC RF TXRX ISM>1GHZ 32VFQFN
MB90548GSPMC-G-291-JNE1
Infineon Technologies
IC MICROCONTROLLER 100LQFP
TL064ID
STMicroelectronics
IC OPAMP JFET 4 CIRCUIT 14SO
C5750X5R2E105M230KA
TDK Corporation
CAP CER 1UF 250V X5R 2220
C3216C0G2A104J160AC
TDK Corporation
CAP CER 0.1UF 100V C0G 1206
R5F1037AANA#W0
Renesas Electronics America Inc
IC MCU 16BIT 16KB FLASH 24HWQFN
CGA5L2X8R1H474M160AE
TDK Corporation
CAP CER 0.47UF 50V X8R 1206
B82793C0104N201
EPCOS - TDK Electronics
CMC 100UH 500MA 2LN SMD AEC-Q200
SN74AHCT126PWR
Texas Instruments
IC BUF NON-INVERT 5.5V 14TSSOP
04025C102KAT2A
KYOCERA AVX
CAP CER 1000PF 50V X7R 0402
ZMM5.6
Diotec Semiconductor
DIODE ZENER 5.6V 500MW SOD80C
ST7FOXA0M6
STMicroelectronics
IC MCU 8BIT 2KB FLASH 8SOIC
SN65LVDS179MDGKREP
Texas Instruments
IC TRANSCEIVER FULL 1/1 8VSSOP
AD8534ARU-REEL
Analog Devices Inc.
IC OPAMP GP R-R CMOS 14TSSOP
SN74HCT138PWR
Texas Instruments
IC DECODER/DEMUX 1X3:8 16TSSOP -

1812AA681KAT1A\SB
KYOCERA AVX
CAP CER 680PF 1KV C0G/NP0 1812
MAX3221CDB
Texas Instruments
IC TRANSCEIVER FULL 1/1 16SSOP
SN74LVC3G07DCTR
Texas Instruments
IC BUFFER NON-INVERT 5.5V SM8
LT6237IMS8#PBF
Analog Devices Inc.
IC OPAMP GP 2 CIRCUIT 8MSOP
74VHCT573ASJ
onsemi
IC LATCH OCTAL D 3STATE 20SOP
VE-240-IV
Vicor Corporation
DC DC CONVERTER 5V 150W
81CNQ045ASL
Vishay General Semiconductor - Diodes Division
DIODE ARRAY SCHOTTKY 45V D618SL
MX7821KP
Analog Devices Inc./Maxim Integrated
MX7821 8-BIT ADC WITH T/H
2N3440
Solid State Inc.
TRANS NPN 250V 1A TO39
APX803S-29SA-7
Diodes Incorporated
IC SUPERVISOR 1 CHANNEL SOT23
CD74HCT125M
Texas Instruments
IC BUF NON-INVERT 5.5V 14SOIC
VNP20N07-E
STMicroelectronics
IC PWR DRIVER N-CHAN 1:1 TO220AB
GRM3166T1H330JD01D
Murata Electronics
CAP CER 33PF 50V T2H 1206
TC1-1-13MA+
Mini-Circuits
RF TRANSFORMER, 4.5 - 3000 MHZ,
SN74ABT125DR
Texas Instruments
IC BUF NON-INVERT 5.5V 14SOIC
HMC6545LP5E
Analog Devices Inc.
IC EQUALIZER 32GBPS 32QFN
GRM32RR71H105KA01K
Murata Electronics
CAP CER 1UF 50V X7R 1210
AD7945BNZ
Analog Devices Inc.
IC DAC 12BIT A-OUT 20DIP -
HMC625BLP5E
Analog Devices Inc.
IC RF AMP VSAT 0HZ-6GHZ 32QFN
PS1102HA-32-TR
Stanley Electric Co
LED INDICATION SMD
5555077-1
TE Connectivity AMP Connectors
CONN MOD JACK 6P6C R/A UNSHLD
AD9742ARU
Analog Devices Inc.
IC DAC 12BIT A-OUT 28TSSOP
P78001-500NDGI
Renesas Electronics America Inc
IC REG LINEAR PMIC 56VFQFPN
MC74VHCT86ADTR2G
onsemi
IC GATE XOR 4CH 2-INP 14TSSOP
MAX868EUB-T
Analog Devices Inc./Maxim Integrated
IC REG CHARGE PUMP INV 10UMAX
SC4530WLTRT
Semtech Corporation
IC REG BUCK ADJ 300MA 8MLPD
SN74LVC1G125YZPRB
Texas Instruments
MOS GENERAL PURP LOG
GRM033R61E104ME14D
Murata Electronics
CAP CER 0.1UF 25V X5R 0201
STP55NF06L
STMicroelectronics
MOSFET N-CH 60V 55A TO220AB
LP2985-33DBVRG4
Texas Instruments
IC REG LINEAR 3.3V 150MA SOT23-5
NAND512R3A2CZA6E
Micron Technology Inc.
IC FLASH 512MBIT PAR 63VFBGA
BA1604
Rohm Semiconductor
IC TELECOM INTERFACE 8DIP
CC0603ZRY5V8BB474
YAGEO
CAP CER 0.47UF 25V Y5V 0603
WP21-S030VA1-R8000
JAE Electronics
CONN RCPT 30POS SMD GOLD
12061A121JAT2A\DF
KYOCERA AVX
CAP CER 120PF 100V C0G/NP0 1206
MSA-0636-TR1G
Broadcom Limited
IC AMP ISM 0HZ-900MHZ 36 MICRO-X