Sterowniki silników L298N: funkcje, diagramy obwodu i zastosowania
Katalog
Wprowadzenie do L298N
L298n jest pionową wersją L298.Jest to podwójny układ sterownika silnika pełnego mostu, który może akceptować wysokie napięcie i prąd wysoki.Jego napięcie robocze może osiągnąć 46 V, a maksymalny prąd wyjściowy wynosi 4A.Ponadto L298N ma również dwa zaciski sterujące.Te zaciski sterujące umożliwiają dynamiczne dostosowanie trybu roboczego obwodu poprzez podłączenie i odłączanie wbudowanego zworki bez zakłócania sygnału wejściowego.L298N jest wyposażony w wejście mocy logicznej, co umożliwia wewnętrzną część obwodu logicznego działać przy niskim napięciu.Jednocześnie może również wyświetlić napięcie logiczne 5 V zewnętrznie.Aby uniknąć uszkodzenia układu stabilizującego napięcie, przy użyciu napięcia jazdy wyższego niż 12 V, zdecydowanie zaleca się użycie zewnętrznego interfejsu 5V do niezależnego zasilania.
L298N kontroluje zacisk wejściowy we/wy na głównym chipie sterującym i dostosowuje napięcie wyjściowe bezpośrednio przez zasilanie, aby zrealizować do przodu, do przodu, do tyłu i zatrzymania silnika.Zwykle L298N może bezpośrednio napędzać przekaźniki (czterokierunkowe), elektromagnety, zawory elektromagnesu, dwa silniki DC i jeden silnik krokowy (dwufazowy lub czterfazowy).
Alternatywy i odpowiedniki:
• E-L298N
• • L298HN
• • MAX14870ETC+T.
• LM18298T
Funkcjonalne cechy L298N
Kompatybilność wprowadzania logiki: Wejście logiczne L298N jest kompatybilne z TTL, CMOS i innymi poziomami logiki.
Ochrona przegrzania: L298N ma funkcję ochrony przegrzania.Gdy temperatura układu jest zbyt wysoka, automatycznie odłączy wyjście.
Wbudowana bezpłatna dioda polaryzacyjna: L298N ma wbudowaną bezpłatną diodę polaryzacyjną, która może być używana do hamowania silników DC.
Duży prąd wyjściowy: L298N może zapewnić duży prąd wyjściowy i jest odpowiedni dla niektórych aplikacji wymagających dużego prądu napędowego.
Struktura podwójnego mostu H: L298N integruje podwójną konstrukcję mostka H, która może kontrolować kierownictwo i prędkość dwóch silników prądu stałego lub silników krokowych.
Schemat obwodu L298N
Schemat obwodu L298N jest następujący:
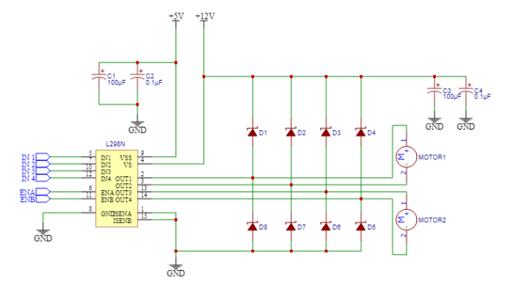
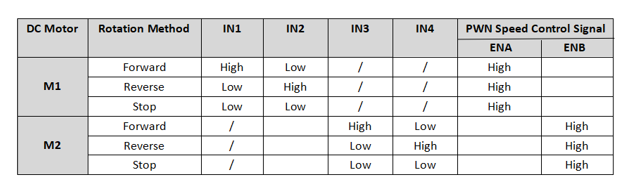
OUT1, OUT2 i OUT3, OUT4 są podłączone do Motor1, Motor2;IN1, IN2, IN3, in4 piny z mikrokontrolera w celu uzyskania dostępu do poziomu sterowania, aby kontrolować silnik do przodu i do tyłu;ENA, ENB podłączone do kontroli zacisku Włącz, kontrolowanie prędkości silnika.Schemat relacji logiki kontrolnej L298N jest następujący:
Jeśli chodzi o regulację prędkości motorycznej, przyjęliśmy metodę regulacji prędkości PWM.Zasada polega na uświadomieniu sobie regulacji prędkości poprzez kontrolowanie czasu przewodzenia T rury przełączającej w jednym cyklu.Średnie napięcie u na silniku podczas całkowitego cyklu T można wyrazić jako u = vcc × (t/t) = a × vcc.Gdzie a = t/t, jest znany jako cykl pracy, a VCC reprezentuje napięcie zasilania.Prędkość silnika jest proporcjonalna do napięcia na silniku, podczas gdy napięcie na silniku jest proporcjonalne do cyklu pracy przebiegu kontrolnego.Dlatego istnieje proporcjonalny związek między prędkością silnika a cyklem pracy: im wyższy cykl pracy, tym szybsza prędkość silnika.
Metoda kontrolna L298N
Podczas korzystania z L298N musimy wprowadzić sygnały sterujące do IN1, IN2, IN3 i IN4, aby kontrolować obrót do przodu i do tyłu oraz prędkość silnika.Oto kilka metod kontrolnych:
Tryb sterowania PWM
Tryb PWM może skutecznie kontrolować prędkość silnika.Podczas korzystania z trybu PWM musimy użyć dwóch pinów EN1 i EN2, aby dostosować prędkość silnika.W szczególności, gdy piny EN1 i EN2 są na wysokim poziomie, silnik będzie działał normalnie;Gdy są na niskim poziomie, silnik przestanie się obracać.
Tryb sterowania w jedną stronę
Gdy IN1, IN2, IN3 i IN4 są jednocześnie wysoki poziom, silnik obraca się do przodu;Gdy dowolne dwa porty wejściowe są wysoki, a pozostałe dwa porty wejściowe są niskie, silnik obraca się odwrotnie.
Tryb sterowania dwukierunkowym
Podczas korzystania z trybu sterowania dwukierunkowego IN1 i IN2 są odpowiedzialne za kontrolowanie silnika 1, podczas gdy IN3 i IN4 są odpowiedzialne za kontrolowanie silnika 2. W szczególności, gdy IN1 jest wysoki, a IN2 jest niski poziom, silnik 1 będzie obrócić do przodu;I odwrotnie, gdy IN1 jest niski poziom, a IN2 jest wysoki, silnik 1 obróci się odwrotnie.W ten sam sposób logika sterowania IN3 i IN4 ma również zastosowanie do kontroli obrotu do przodu i do tyłu silnika 2.
Diagram i funkcje L298N

Pin Power
VS: Wejście napięcia zasilania (do 46 V)
GND: szpilka uziemienia
Pin sterujący logiki
IN1, IN2: Służy do kontrolowania kierunku obrotu silnika 1
IN3, IN4: Służy do kontrolowania kierunku obrotu silnika 2
Pin motoryczny:
Out1, out2: Służy do kontrolowania kierunku silnika 1
Out3, out4: Służy do kontrolowania kierunku silnika 2
ENA: Włącz pin, używany do sterowania prędkością silnika 1
ENB: Włącz pin, używany do sterowania prędkością silnika 2
Jak używać L298N?
Podłącz zasilanie: Zasilacz modułu sterownika L298N powinien być przechowywany w zakresie od 12 V do 35 V.W praktycznych zastosowaniach, aby zapewnić stabilność zasilacza, możemy również potrzebować filtrowania zasilacza.
Podłącz silniki: Podłączamy dwa silniki do pinów wyjściowych L298N przez sterownik, a poziom sterowania jest bezpośrednio wprowadzany do silnika przez L298N.
Kontrola L298N: Używamy portu sterującego (włącz pin sterujący) do sterowania L298N.Musimy ustawić status portu Włącz i PIN sterowania podczas przypisywania wartości.Stanowie te określi status poziomu wyjścia L298N.Zmieniając te stany, możemy skutecznie kontrolować obrót do przodu i do tyłu oraz prędkość silnika.
Jak używać PWM do regulacji prędkości silnika?
Jeśli chcemy użyć PWM do regulacji prędkości silnika, mamy dwie metody okablowania:
Metoda okablowania pierwsza (zalecana):
Usuwamy nasadkę między kanałem a 5 V, podłączamy pin Enable z pinem PWM Arduino i łączymy szpilki 1 i 2 z dwoma normalnymi pinami Arduino.W ten sposób możemy kontrolować przełącznik kanału przez pin PWM, aby dostosować prędkość silnika;Kontrolując poziom poziomu pinów 1 i 2, możemy kontrolować kierunek obrotu silnika.Ten sposób okablowania wymaga tylko użycia jednego pinu PWM na kanał, ale przyjmuje dwa normalne szpilki.Dlatego w praktycznych zastosowaniach musimy ważyć i wybrać między wieloma metodami okablowania oparte na liczbie pinów dostępnych na Arduino.
Metoda okablowania druga (nie zalecana):
Nie usuwamy zworki między włączaniem kanału a 5 V, więc kanał pozostanie stale otwarty.Następnie podłączyliśmy piny 1 i 2 z dwoma interfejsami PWM odpowiednio Arduino.Kontrolując wyniki odpowiadające odpowiednio tym dwoma pinami, możemy kontrolować kierunek i prędkość obrotu silnika.Oczywiście ta metoda okablowania zajmie więcej pinów PWM, ponieważ każdy kanał wymaga dwóch pinów PWM do kontroli.Jednak ta metoda nie zajmuje żadnych wspólnych pinów.Dlatego nie zalecamy użycia tego schematu okablowania, gdy zasoby PWM PIN są ścisłe.
Gdzie jest używany L298N?
Pojazdy elektryczne: L298N może być używany do kontrolowania silników napędowych w pojazdach elektrycznych, takich jak rowery elektryczne, skutery itp. Na przykład w rowerach, poprzez precyzyjne kontrolowanie prędkości obrotowej i kierunku silnika, L298N może osiągnąć przyspieszenie, opóźnienie iStabilna jazda rowerów elektrycznych.Jeździec może przesyłać instrukcje do L298N, obsługując uchwyt lub przyciski, kontrolując w ten sposób wyjście silnika, aby napęd rowerem zgodnie z życzeniami jeźdźca.
Zautomatyzowany sprzęt przemysłowy: w dziedzinie automatyzacji przemysłowej L298N może być wykorzystywany do kontrolowania silników różnych urządzeń przemysłowych, takich jak przenośniki, ramiona robotyczne, roboty przemysłowe itp. Na przykład w ramieniu robotycznym L298N dokładnie kontrolujeKąt obrotu i prędkość silnika, umożliwiając ramię robotyczne poruszanie się zgodnie z z góry określoną trajektorią i osiągnięcie wysokiej precyzyjnej operacji.To nie tylko poprawia wydajność produkcji, ale także zmniejsza straty produkcyjne spowodowane błędami operacyjnymi.
Technologia robota: L298N jest często używany w projektach robotów w celu kontrolowania silnika napędowego w celu zrealizowania ruchu i działania robota.Roboty przemysłowe często muszą podejmować ciężkie, precyzyjne prace i mieć wyjątkowo wysokie wymagania dotyczące silników napędowych.L298N zapewnia potężne wsparcie mocy dla robotów przemysłowych o doskonałej zdolności do jazdy i stabilności.Niezależnie od tego, czy jest to obsługa, montaż czy inspekcja, L298N może zapewnić, że roboty przemysłowe dokładnie i wydajnie wykonują zadania.
Smart Home: W Smart Home Systems, L298N może być używany do kontrolowania silników rolet, zasłon, drzwi i innego sprzętu w celu uzyskania automatycznej kontroli.Łącząc się z czujnikami, sprzęt domowy można automatycznie regulować zgodnie z oświetleniem, temperaturą i innymi warunkami.
System śledzenia słonecznego: W układach słonecznych L298N może być używany do kontrolowania kąta pochylenia paneli słonecznych w celu wdrożenia systemu śledzenia słonecznego.Dzięki kontroli L298N system śledzenia słonecznego może wyczuć zmiany położenia Słońca w czasie rzeczywistym i odpowiednio dostosować kąt pochylenia paneli słonecznych.Ten dynamiczny proces regulacji zapewnia, że panele słoneczne zawsze utrzymują optymalny kąt do słońca, poprawiając w ten sposób wydajność gromadzenia energii paneli słonecznych.
Często zadawane pytania [FAQ]
1. Czy prędkość sterowania L298N może
L298N to podwójny sterownik silnika mostka, który umożliwia jednocześnie szybkość i kontrolę nad dwoma silnikami prądu stałego.
2. Dlaczego mój L298N nie działa?
Musi być powyżej 4,5 V dla prawidłowego działania L298.2. Stracisz być może 2,5 V w całym L298.Może nie ma wystarczającej ilości napięcia, aby uruchomić silnik.
3. Co to jest L298N?
Sterownik silnika L298N to kontroler, który wykorzystuje most H do łatwego kontrolowania kierunku silników i PWM do kontrolowania prędkości.Ten moduł pozwala niezależnie zarządzać dwoma silnikami do 2A każdy w obu kierunkach.Zakres zaopatrzenia może wahać się od 5 V do 35 V, wystarczającą do większości projektów motorycznych DC.
4. Czy możemy podłączyć 4 silniki do L298N?
Odpowiedź brzmi tak i nie. To zależy od tego, jak korzystasz z sterownika silnika L298N.L298N pierwotnie zaprojektowany do kontrolowania dwóch silników DC lub jednego silnika krokowego.Ale jeśli nie chcesz, aby każdy silnik obrócił się do tyłu, możesz użyć każdej strony sterownika L298N do kontrolowania dwóch silników prądu stałego i w sumie 4 silników.