MPU-6050 In Action: Praktyczny przewodnik konfiguracji, konfiguracji i zarządzania szumami
Katalog
Wprowadzenie do MPU-6050
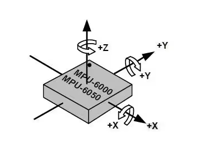
MPU-6050 jest pierwszym na świecie zintegrowanym 6-osiowym komponentem przetwarzania ruchu, który integruje 3-osiowy żyroskop, 3-osiowy akcelerometr i skalowalny cyfrowy procesor ruchu (DMP).Celem użycia jest uzyskanie kąta nachylenia obiektu do zmierzenia (takiego jak quadkopter, samochód równoważący) na osiach x, y i z, to znaczy kąt skoku, kąt rolki i kąt odchylenia.Odczytujemy sześć danych MPU-6050 (trzyosiowa wartość reklamy przyspieszenia i trzyosiowa wartość reklamy kątowej) za pośrednictwem interfejsu I2C.Po przetwarzaniu fuzji postawy można obliczyć kąty skoku, rolki i odchylenia.Jako kierunkowe odniesienie dla wartości pomiarowych definicja kierunku współrzędnej czujnika jest jak pokazano na poniższym rysunku, który jest zgodny z zasadą prawego układu współrzędnych (to znaczy prawego kciuka wskazuje pozytywny kierunek x-Oś, palec wskazujący wskazuje na dodatni kierunek osi Y, a środkowy palec wskazuje na dodatni kierunek osi Z).
Dzięki dedykowanej magistrali czujnikowej I2C MPU-6050 jest w stanie odbierać wejście bezpośrednio z zewnętrznego 3-osiowego kompasu, zapewniając pełne 9-osiowe wyjście Motionfusion ™.Eliminuje problem rozbieżności między połączonym harmonogramem żyroskopu i akceleratora i znacząco zmniejsza przestrzeń opakowań w porównaniu z rozwiązaniami wieloskładnikowymi.Po podłączeniu do trzyosiowego magnetometru MPU-60X0 jest w stanie zapewnić pełne 9-osiowe wyjście fuzji ruchu do swojego głównego portu I2C lub SPI (pamiętaj, że port SPI jest dostępny tylko w MPU-6000).
Alternatywy i równoważniki
• • AIS328DQTR
• • ICM-20689
• MPU-3300
• • MPU-6000
• • MPU-6500
Producent MPU-6050
Producentem MPU-6050 jest TDK.Po dwóch założycielach TDK, dr Yogoro Kato i Takei Takei, wynalecili ferrite w Tokio, założyli Tokyo Denkikagaku Kogyo K.K.W 1935 r. Jako globalna marka przemysłu elektronicznego TDK zawsze utrzymywała dominującą pozycję w dziedzinie elektronicznych surowców i komponentów elektronicznych.Kompleksowe i oparte na innowacji portfolio produktów obejmuje pasywne komponenty, takie jak kondensatory ceramiczne, aluminiowe kondensatory elektrolityczne, kondensatory folii, produkty magnetyczne, komponenty o wysokiej częstotliwości, urządzenia piezoelektryczne i ochronne, a także czujniki i układy czujników (takie jak temperatura i presja,Czujniki magnetyczne i MEMS) itp. Ponadto TDK zapewnia również zasilacze i urządzenia energetyczne, głowy magnetyczne i inne produkty.Jego marki produktów to TDK, EPCOS, Invensense, Micronas, Tronics i TDK-Lambda.
Wewnętrzny schemat blokowy MPU-6050
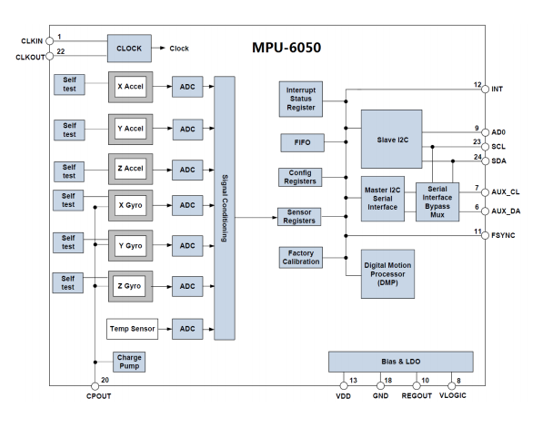
Wśród nich SCL i SDA to interfejsy IIC połączone z MCU, a MCU kontroluje MPU-6050 przez ten interfejs IIC.Istnieje również interfejs IIC, a mianowicie aux_cl i aux_da.Ten interfejs może być używany do łączenia zewnętrznych urządzeń niewolniczych, takich jak czujniki magnetyczne, w celu utworzenia czujnika dziewięciopasowego.Vlogic to napięcie portu IO.Ten PIN może obsługiwać minimum 1,8 V.Zwykle łączymy go bezpośrednio z VDD.AD0 to styk sterowania adresem interfejsu niewolnika IIC (podłączony do MCU).Ten pin kontroluje najniższy kawałek adresu IIC.Jeśli jest podłączony do GND, adres IIC MPU-6050 wynosi 0x68;Jeśli jest podłączony do VDD, jest to 0x69.Należy pamiętać, że adres tutaj nie zawiera najniższego bitu transmisji danych (najniższy bit służy do reprezentowania operacji odczytu i zapisu).Na MWBalanceStC15 AD0 jest podłączony do GND, więc adres IIC MPU-6050 wynosi 0x68 (z wyłączeniem najniższego bitu).
Zainicjuj interfejs IIC
MPU-6050 wykorzystuje IIC do komunikacji ze STC15, dlatego musimy najpierw zainicjować linie danych SDA i SCL podłączone do MPU-6050.
Zresetuj MPU-6050
Ten krok przywraca wszystkie rejestry wewnątrz MPU-6050 do ich wartości domyślnych, które osiąga się, pisząc 1 do bit 7 rejestru zarządzania energią 1 (0x6b).Po zresetowaniu rejestr zarządzania energią 1 zostanie przywrócony do wartości domyślnej (0x40), a rejestr ten musi następnie zostać ustawiony na 0x00, aby obudzić MPU-6050 i umieścić go w normalnym stanie roboczym.
Ustaw pełną skalę zasięg czujnika prędkości kątowej (żyroskop) i czujnika przyspieszenia
W tym etapie ustawiamy odpowiedni zakres (FSR) dwóch czujników za pomocą rejestru konfiguracji żyroskopu (0x1b) i rejestru konfiguracji czujnika przyspieszenia (0x1c).Zazwyczaj ustawiamy pełną skalę zakres żyroskopu na ± 2000dps i pełny zakres akcelerometru na ± 2 g.
Ustaw inne parametry
Tutaj musimy również skonfigurować następujące parametry: wyłączyć przerwania, wyłączyć interfejs Aux I2C, wyłączyć FIFO, ustawić szybkość próbkowania żyroskopu i skonfigurować cyfrowy filtr dolnoprzepustowy (DLPF).Ponieważ w tym rozdziale nie używamy przerw do odczytu danych, funkcja przerwania musi zostać wyłączona.Jednocześnie, ponieważ nie używamy interfejsu Aux I2C do podłączenia innych czujników zewnętrznych, musimy również zamknąć ten interfejs.Funkcje te można kontrolować za pośrednictwem rejestru Enable Register (0x38) i rejestru sterowania użytkownika (0x6a).MPU-6050 może użyć FIFO do przechowywania danych z czujników, ale nie użyliśmy ich w tym rozdziale, więc wszystkie kanały FIFO muszą zostać zamknięte.Można to kontrolować za pośrednictwem rejestru FIFO Enable (0x23).Domyślnie wartość tego rejestru wynosi 0 (to znaczy FIFO jest wyłączone), więc możemy bezpośrednio użyć wartości domyślnej.Szybkość próbkowania żyroskopu jest kontrolowana przez rejestr podziału szybkości próbkowania (0x19).Zwykle ustawiamy tę szybkość próbkowania na 50. Konfiguracja cyfrowego filtra dolnoprzepustowego (DLPF) jest zakończona za pośrednictwem rejestru konfiguracji (0x1a).Ogólnie rzecz biorąc, ustawimy DLPF na połowę przepustowości, aby zrównoważyć dokładność danych i szybkość reakcji.
Skonfiguruj źródło zegara systemu i włącz czujnik prędkości kątowej i czujnik przyspieszenia
Ustawienie źródła zegara systemowego zależy od rejestru zarządzania energią 1 (0x6b), w którym najniższe trzy bity tego rejestru określają wybór źródła zegara.Domyślnie te trzy bity są ustawione na 0, co oznacza, że system wykorzystuje wewnętrzny oscylator RC 8 MHz jako źródło zegara.Jednak w celu poprawy dokładności zegara często ustawiamy ją na 1 i wybieramy PLL żyroskopu osi X jako źródło zegara.Ponadto ważnym krokiem w procesie inicjalizacji jest włączenie czujnika prędkości kątowej i czujnika przyspieszenia.Obie operacje są wdrażane za pośrednictwem zarządzania energią 2 (0x6c).Po prostu ustaw odpowiedni bit na 0, aby aktywować odpowiedni czujnik.Po wykonaniu powyższych kroków MPU-6050 może wprowadzić normalny status pracy.Te rejestry, które nie są specjalnie ustawione, przyjmują domyślne wartości ustawione przez system.
Jak działa MPU-6050?
Czujnik żyroskopowy
Czujnik jest wyposażony w żyroskop w środku, który zawsze pozostanie równoległy do kierunku początkowego z powodu efektu żyroskopowego.Dlatego możemy obliczyć kierunek i kąt obrotu, wykrywając odchylenie żyroskopu od początkowego kierunku.
Czujnik akcelerometru
Czujnik akcelerometru to urządzenie, które może mierzyć przyspieszenie i działa w oparciu o zasadę efektu piezoelektrycznego.Podczas przyspieszenia czujnik mierzy siłę bezwładności przyłożoną do bloku masy, a następnie oblicza wartość przyspieszenia za pomocą drugiego prawa Newtona.
Cyfrowy procesor ruchu (DMP)
DMP to moduł przetwarzania danych w układie MPU6050, który ma wbudowany algorytm filtrowania Kalmana do pozyskiwania danych z żyroskopu i czujników akcelerometru oraz przetwarzanie czwartorzędowych wyjściowych.Ta funkcja znacznie zmniejsza obciążenie mikroprocesora peryferyjnego i unika żmudnego procesu filtrowania i fuzji danych.
Uwagi:
Quaterniony: Quaterniony są prostymi liczbami superkompleksowymi.Liczby złożone składają się z liczb rzeczywistych plus wyimaginowaną jednostkę I, gdzie I^2 = -1.
Gdzie jest używany MPU-6050?
• Zabawki
• Słuchawka i przenośne gry
• Kontrolery gier oparte na ruchu
• Technologia Blurfree ™ (do stabilizacji obrazu/martwych obrazów)
• Technologia AIRSIGN ™ (do bezpieczeństwa/uwierzytelnienia)
• Rozpoznawanie gestów Instant przez IG ™ IG ™
• Czujniki do noszenia na zdrowie, fitness i sport
• Framework gier i aplikacji z obsługą ruchu
• Technologia Motioncommand ™ (dla krótkich gestów)
• Usługi oparte na lokalizacji, interesujące punkty i martwe rozważanie
• Zdalne sterowanie 3D dla DTV podłączonych do Internetu i zestawów zestawów, myszy 3D
• Technologia Touchanywhere ™ (dla „No Touch” Kontrola aplikacji/nawigacji interfejsu użytkownika)
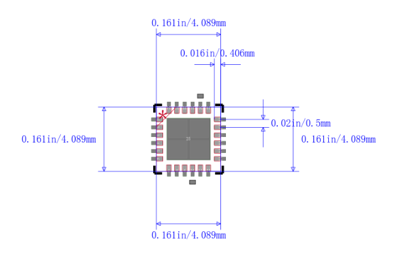
Pakiet MPU-6050
Jak zmniejszyć hałas MPU-6050?
Możemy podjąć następujące sposoby zmniejszenia hałasu MPU-6050:
Użyj skalibrowanych czujników: Kalibracja akcelerometru i żyroskopu MPU-6050 może wyeliminować odchylenie i błąd samych czujników, zmniejszając w ten sposób wpływ szumu.Proces kalibracji zwykle składa się z dwóch etapów: kalibracji statycznej i kalibracji ruchu.
Proces filtrowania sprzętu: Dodanie kondensatorów filtra do linii zasilania MPU-6050 może zmniejszyć wpływ szumu zasilacza na czujnik.Tymczasem podczas układu PCB powinniśmy starać się powstrzymać MPU-6050 z dala od potencjalnych źródeł zakłóceń, takich jak linie sygnałowe o wysokiej częstotliwości i komponenty o dużej mocy.
Przetwarzanie filtrowania oprogramowania: Po zebraniu surowych danych z MPU-6050 możemy dodać link do filtrowania oprogramowania, aby wstępnie przetwarzać dane początkowe, aby wyeliminować zakłócenia wywołane szumem.Powszechnie stosowane metody filtrowania oprogramowania obejmują średnie filtrowanie, filtrowanie mediany, filtrowanie Kalmana i tak dalej.
Użyj wewnętrznego filtra dolnoprzepustowego: MPU-6050 ma wewnętrzny zintegrowany cyfrowy filtr dolnoprzepustowy, który można wykorzystać do zmniejszenia szumu o wysokiej częstotliwości poprzez ustawianie jego częstotliwości odcięcia.W szczególności możemy ustawić częstotliwość odcięcia filtra cyfrowego, modyfikując rejestr konfiguracyjny MPU-6050, aby wyeliminować szum o wysokiej częstotliwości spowodowany próbkowaniem A/D.
Obliczanie trajektorii ruchu MPU-6050
MPU-6050 to sześcioosiowy akcelerometr i czujnik żyroskopowy, który można użyć do pomiaru ruchu i postawy obiektów.Obliczenia trajektorii ruchu oparte na MPU-6050 można zrealizować w następujących krokach:
Pierwszym krokiem jest odczytanie danych czujnika.Musimy odczytać dane akcelerometru i żyroskopu z czujników MPU-6050 za pomocą odpowiednich funkcji sterowników i biblioteki.Dane te są zwykle wysyłane w formacie cyfrowym, więc wymagane są pewne prace konwersji i kalibracji, aby przekonwertować je na rzeczywiste pomiary w jednostkach fizycznych.
Drugim krokiem jest obliczenie przyspieszenia.Najpierw musimy przetworzyć dane z akcelerometru, aby uzyskać przyspieszenie obiektu w każdej osi.Następnie, aby obliczyć prędkość i przesunięcie obiektu w każdej osi, musimy zintegrować dane przyspieszenia.Techniki integracji numerycznej, takie jak metoda Eulera lub metoda Lunger-Kutta, są często stosowane w tym procesie, aby zapewnić dokładność obliczeń przemieszczenia.
Trzecim krokiem jest obliczenie prędkości kątowej.Za pomocą danych żyroskopowych można obliczyć prędkość kątową obiektu w każdej osi.Ponownie dane te muszą zostać skalibrowane i przekonwertowane, aby uzyskać prędkość kątową w rzeczywistych jednostkach fizycznych.
Czwartym krokiem jest obliczenie obrotu.Dzięki integracji danych prędkości kątowej można obliczyć kąt obrotu obiektu w każdej osi.Można to zrobić za pomocą technik integracji numerycznej, takich jak metoda Eulera lub metoda Longe-Kutta do obliczenia kąta.
Piątym krokiem jest połączenie danych.Łączymy dane z akcelerometrów i żyroskopów, aby uzyskać pełne informacje o postawie i pozycji obiektu.Można to zrobić przy użyciu algorytmów, takich jak rozwiązanie oparte na czwartorzędu lub solver kąt eulera.
Szóstym krokiem jest wizualizacja wyników.Konwertujemy obliczoną trajektorię ruchu obiektu na zestaw punktów w systemie współrzędnych 3D i wyświetlamy go przy użyciu odpowiednich narzędzi do wizualizacji w celu bardziej intuicyjnego zrozumienia trajektorii ruchu i zmian w postawie obiektu.
Często zadawane pytania [FAQ]
1. Jak dokładne jest MPU6050?
Nabyte wyniki wykazały wystarczającą dokładność mniejszą niż 1 % i niezawodność, zapewniając właściwe wymiary wału windy i wysokie standardy branży wind.
2. Jak odczytać dane z MPU6050?
Aby przeczytać wewnętrzne rejestry MPU6050, Master wysyła warunek rozpoczęcia, a następnie adres niewolnika I2C i bit zapisu, a następnie adres rejestru, który zostanie odczytany.
3. Gdzie jest używany MPU6050?
W przypadku śledzenia zdrowia w noszeniu urządzenia śledzenia fitness.W dronach i quadkopterach MPU6050 służy do kontroli pozycji.Stosowane w kontrolowaniu ramię robotyczne.Urządzenia sterujące gestami rąk.
4. Czy MPU6050 jest IMU?
Blok czujnika IMU MPU6050 odczytuje dane z czujnika MPU-6050 podłączonego do sprzętu.Blok wyświetla przyspieszenie, szybkość kątowa i temperaturę wzdłuż osi czujnika.
5. Jakie jest przetwarzanie MPU6050?
Jest to wbudowany procesor MPU6050, który łączy dane pochodzące z akcelerometru i żyroskopu.DMP jest kluczem do korzystania z MPU6050 i jest szczegółowo wyjaśniony później.Podobnie jak w przypadku wszystkich mikroprocesorów, DMP potrzebuje oprogramowania układowego w celu uruchomienia.
O nas
ALLELCO LIMITED
Czytaj więcej
Szybkie zapytanie.
Proszę wysłać zapytanie, natychmiast odpowiemy.

Dogłębny przewodnik po LM317: Zrozumienie regulowanych regulatorów napięcia
na 2024/09/3
Zrozumienie TL431: Kompleksowy przewodnik po precyzyjnych organach organów bocznych
na 2024/09/3
Popularne posty
-
Co to jest GND w obwodzie?
na 1970/01/1 3108
-

Podręcznik złącza RJ-45: Kody kolorów złącza RJ-45, schematy okablowania, aplikacje R-J45, arkusze danych RJ-45
na 1970/01/1 2672
-
Zrozumienie napięć zasilania w elektronice VCC, VDD, VEE, VSS i GND
na 0400/11/15 2211
-

Rodzaje złącza światłowodowego: SC vs LC i LC vs MTP
na 1970/01/1 2182
-

Porównanie DB9 i RS232
na 1970/01/1 1802
-

Co to jest bateria LR44?
Energia elektryczna, ta wszechobecna siła, cicho przenika każdy aspekt naszego codziennego życia, od trywialnych gadżetów po zagrażające życiu sprzęt medyczny, odgrywa cichą rolę.Jednak naprawdę chwytanie tej energii, zwłaszcza sposobu jej przechowywania i wydajności, nie jest łatwym zadaniem.Na tym tle ten artykuł skupi się na rodzaju akumulatora monety, który może wydawać si...na 1970/01/1 1774
-
Zrozumienie podstaw: odporność na indukcyjność i nakładanie
W skomplikowanym tańcu inżynierii elektrycznej trio podstawowych elementów zajmuje centralne miejsce: indukcyjność, opór i pojemność.Każda z nich ma unikalne cechy, które dyktują dynamiczne rytmy obwodów elektronicznych.Tutaj wyruszamy w podróż, aby rozszyfrować złożoność tych komponentów, aby odkryć ich wyraźne role i praktyczne zastosowania w rozległej orkiestrze elektrycz...na 1970/01/1 1728
-

CR2430 Kompleksowy Przewodnik po baterii: Specyfikacje, aplikacje i porównanie z akumulatorami CR2032
Co to jest bateria CR2430?Korzyści z baterii CR2430NormaZastosowania baterii CR2430CR2430 równoważnyCR2430 vs CR2032Bateria CR2430 RozmiarCzego szukać przy zakupie CR2430 i równoważnikówArkusz danych pdfCzęsto zadawane pytania Baterie są sercem małych urządzeń elektronicznych.Spośród wielu dostępnych rodzajów komórki monety odgrywają kluczową rolę, powszechnie występującą w ...na 1970/01/1 1674
-
Co to jest RF i dlaczego go używamy?
Technologia częstotliwości radiowej (RF) jest kluczową częścią nowoczesnej komunikacji bezprzewodowej, umożliwiając transmisję danych na duże odległości bez fizycznych połączeń.Ten artykuł zagłębia się w podstawy RF, wyjaśniając, w jaki sposób promieniowanie elektromagnetyczne (EMR) umożliwia komunikację RF.Zbadamy zasady EMR, tworzenia i kontroli sygnałów RF oraz ich sze...na 1970/01/1 1670
-
Kompleksowy przewodnik po HFE w tranzystorach
Tranzystory są kluczowymi komponentami w nowoczesnych urządzeniach elektronicznych, umożliwiając wzmocnienie sygnału i kontrolę.W tym artykule zagłębiono się w wiedzę wokół HFE, w tym jak wybrać wartość HFE tranzystora, jak znaleźć HFE i wzmocnienie różnych rodzajów tranzystorów.Dzięki naszej eksploracji HFE zyskujemy głębsze zrozumienie działania tranzystorów i ich roli ...na 5600/11/15 1632
Gorący numer części
-

LTC4308IDD#PBF
Analog Devices Inc.
IC ACCELERATOR I2C HOTSWAP 8DFN
ADG453BRUZ-REEL7
Analog Devices Inc.
IC SW SPST-NO/NCX4 5OHM 16TSSOP
MX25R1635FM1IL0
Macronix
IC FLASH 16MBIT SPI/QUAD 8SOP
GRM0335C1H6R4BD01D
Murata Electronics
CAP CER 6.4PF 50V C0G/NP0 0201
RT0603DRE0716KL
YAGEO
RES SMD 16K OHM 0.5% 1/10W 0603
SMAJ36CA-13-F
Diodes Incorporated
TVS DIODE 36VWM 58.1VC SMA
ISL97642IRTZ-T
Renesas Electronics America Inc
IC REG TFT-LCD DC/DC 32-TQFN
DG419LEDQ-T1-GE3
Vishay Siliconix
IC SWITCH SPDT X 1 18OHM 8TSSOP
NCP715SQ33T2G
Fairchild Semiconductor
FIXED POSITIVE LDO REGULATOR, 3.
LM4040AIM3-10.0
Texas Instruments
IC VREF SHUNT 0.1% SOT23-3
BCX70G,215
NXP USA Inc.
TRANSISTOR NPN 45V 100MA SOT23
TIP29BG
onsemi
TRANS NPN 80V 1A TO220
CAV25160YE-GT3
onsemi
IC EEPROM 16KBIT SPI 8TSSOP
KA5S1265YDTU
Fairchild Semiconductor
IC REG LINEAR SWITCHING REG
DHS50B28-T
Cosel USA, Inc.
DC DC CONVERTER 28V 50W
CL05B472KB5VPNC
Samsung Electro-Mechanics America, Inc.
CAP CER 4700PF 50V X7R 0402
LM2901AVQDRG4
Texas Instruments
IC COMPARATOR 4 DIFF 14SOIC
LE89316QVC
Microchip Technology
IC TELECOM INTERFACE 48LQFP -

LT1720CS8#TRPBF
Analog Devices Inc.
IC COMPARATOR 2 GEN PUR 8SO
74AC540SJX
Fairchild Semiconductor
IC BUFFER INVERT 6V 20SOP
CDZVT2R24B
Rohm Semiconductor
DIODE ZENER 24V 100MW VMN2M
SI5905DC-T1-E3
Vishay Siliconix
MOSFET 2P-CH 8V 3A 1206-8
RB551V-40
Yangjie Technology
DIODE SCHOTTKY 40V 500MA SOD323
NBC12429FAR2G
onsemi
IC PLL CLOCK GENERATOR 32LQFP
RD27S-T1-A
Renesas
RD27S-T1-A - ZENER DIODES200 MW
S29GL256S10DHB023
Infineon Technologies
IC FLASH 256MBIT PARALLEL 64FBGA
S2K-13-F
Diodes Incorporated
DIODE GEN PURP 800V 1.5A SMB
AOTF20C60P
Alpha & Omega Semiconductor Inc.
MOSFET N-CH 600V 20A TO220-3F
ISL6410AIUZ-TK
Renesas Electronics America Inc
IC REG BUCK PROG 600MA 10MSOP
DAC8830ICDRG4
Texas Instruments
IC DAC 16BIT V-OUT 8SOIC
T40HFL10S02
Vishay General Semiconductor - Diodes Division
DIODE GEN PURP 100V 40A D-55
AOZ2264QI-11
Alpha & Omega Semiconductor Inc.
IC REG BUCK ADJ 15A 23QFNB
SFH1690BT
Vishay Semiconductor Opto Division
OPTOISOLATOR 3.75KV TRANS 4SOP
P6KE68A
SMC Diode Solutions
TVS DIODE 58.1VWM 92VC DO15
MAX243EWE
Analog Devices Inc./Maxim Integrated
IC TRANSCEIVER FULL 2/2 16SOIC
S29AS016J70BFV040
Infineon Technologies
IC FLASH 16MBIT PARALLEL 48FBGA -

UUR1V470MCL1GS
Nichicon
CAP ALUM 47UF 20% 35V SMD
EPM3064ATI44-10N
Intel
IC CPLD 64MC 10NS 44TQFP
NSS60100DMTTBG
onsemi
TRANS 2PNP 60V 1A
INA250A1QPWRQ1
Texas Instruments
IC CURR SENSE 1 CIRCUIT 16TSSOP
12061A102GA12A
KYOCERA AVX
CAP CER 1000PF 100V NP0 1206
TNY174PG
Power Integrations
8.5 W (85-265 VAC) 11 W (230 VAC
1206AC220KAJ1A
KYOCERA AVX
CAP CER 22PF 1KV X7R 1206
AOZ2331DI
Alpha & Omega Semiconductor Inc.
IC SMART LOAD SWITCH 14DFN
CL05C2R7BB5NNND
Samsung Electro-Mechanics
CAP CER 2.7PF 50V NP0 0402
TPS65185RSLR
Texas Instruments
IC PWR MGMT E INK 48VQFN
TLE8458E
Infineon Technologies
IC REG LINEAR FIXED LDO REG
AD9697BCPZRL7-1300
Analog Devices Inc.
IC ADC 14BIT PIPELINED 64LFCSP
MC10H130FNR2
onsemi
IC S-R LATCH DUAL 20PLCC
CM1485-02SE
onsemi
FILTER RC(PI) 100 OHM/12PF SMD
CL31B104JBCNNNC
Samsung Electro-Mechanics
CAP CER 0.1UF 50V X7R 1206
IL300-E-X017T
Vishay Semiconductor Opto Division
OPTOISO 5.3KV PHVOLT 8SMD
VLS4012ET-1R5N
TDK Corporation
FIXED IND 1.5UH 2.1A 72 MOHM SMD
ICS581G-02LFT
Renesas Electronics America Inc
IC FANOUT BUFFER 16TSSOP