TB6600HG Silnik silnika: specyfikacje, funkcje i aplikacje
Katalog
Opis TB6600HG

TB6600HG jest dwubiegunowym dwupolarnym sterownikiem silnika mikrostepowania typu PWM.Może osiągnąć kontrolę obrotu do przodu i do tyłu poprzez 2-fazę, 1-2 fazę, fazę W1-2, fazę 2W1-2 i wzbudzenie 4W1-2 fazy.2-fazowe bipolarne silniki krokowe są napędzane wyłącznie sygnałem zegara o niskiej wibracji, wysokiej wydajności.
Alternatywy i odpowiedniki:
• • BD6290EFV-E2
• • TB6600FG
• • TB67S128ftg
• • L6258EX
Specyfikacje TB6600HG
• Status części: aktywny
• Opakowanie: taca
• Pakiet / obudowa: HZIP-25
• Producent: Toshiba
• Prąd operacyjny: 4,2 Ma
• Napięcie zasilania roboczego: od 2 do 5,5 V
• Ocena napięcia obciążenia: od 8 V do 42 V
• Liczba wyjść: 2 wyjścia
• PD - rozpraszanie mocy: 40 W
• Styl montażowy: przez otwór
• Długość/szerokość/wysokość: 29,3 mm (maks.)/4,5 mm/15.7 mm
• Kategoria produktu: silnik / ruch i sterowniki zapłonu
Warunki pracy TB6600HG
(TA = -30 ° C do 85 ° C)
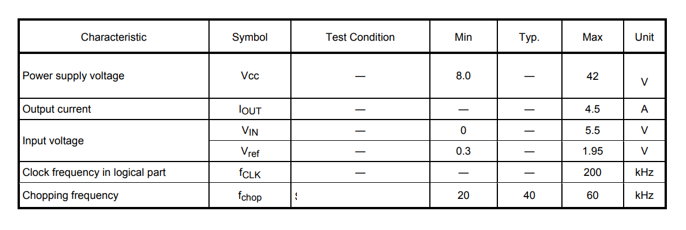
Uwaga: dwa zaciski VCC powinny być zaprogramowane to samo napięcie.Maksymalny prąd zakresu roboczego niekoniecznie może być przeprowadzony w zależności od różnych warunków, ponieważ prąd wyjściowy jest ograniczony przez PD rozpraszania mocy.Unikaj używania IC w stanie, który spowodowałby przekroczenie temperatury TJ (AVG.) = 107 ° C.
Napięcie zasilania 42 V i prąd wyjściowy 4,5 A to maksymalne wartości zakresu roboczego.Zaprojektuj obwód z wystarczającą ilością w tym zakresie, biorąc pod uwagę zmienność zasilacza, opór zewnętrzny i charakterystykę elektryczną IC.W przypadku przekroczenia napięcia zasilania 42 V i prądu wyjściowego 4,5 A, IC nie będzie działać normalnie.
Jak podłączyć TB6600HG z systemem sterowania?
Połączenie zasilania: Po pierwsze, upewnij się, że zapewnij odpowiedni zasilacz do TB6600HG.Podczas zasilania TB6600HG zwykle musisz podłączyć dwa piny: VCC (zasilacz dodatni) i GND (drut uziemiający).PIN VCC jest odpowiedzialny za dostarczenie napięcia wymaganego do napędzania układu, podczas gdy pin GND służy jako poziom gruntu odniesienia.Musimy upewnić się, że zasilacz jest stabilny i spełnia specyfikacje TB6600HG.
Połączenie sygnału: Zgodnie z konkretnymi potrzebami systemu sterowania musimy podłączyć sygnał sterujący z odpowiednim pinem układu sterownika TB6600HG.Te sygnały sterujące zwykle obejmują sygnały sterujące kierunkiem i sygnały impulsu krokowego itp., Które są odpowiedzialne za instruowanie działania silnika, w tym kierunku obrotu i prędkości obrotu.
Połączenie silnika: Musimy zachować szczególną ostrożność podczas podłączania silnika z układem sterownika TB6600HG.Dwa przewody silnika, zwykle czerwone i czarne, reprezentują odpowiednio dodatnie i ujemne bieguny silnika.Czerwony drut zwykle łączy się z dodatnim zaciskiem silnika, podczas gdy czarny drut łączy się z ujemnym zaciskiem.
Połączenie sprzężenia zwrotnego (opcjonalnie): Jeśli do kontroli sprzężenia zwrotnego jest używany enkoder, musimy również podłączyć sygnał wyjściowy enkodera do systemu sterowania.Zazwyczaj obejmuje to wyniki fazy A, fazy B i fazy Z (jeśli są dostępne).
Uziemienie: Musimy upewnić się, że wspólny przewód uziemiający całego sprzętu jest prawidłowo podłączony, aby uniknąć zakłóceń i uszkodzeń.
Ustawienia inicjalizacji: Po zakończeniu połączenia musimy zainicjować ustawienia TB6600HG, aby upewnić się, że działa poprawnie.Może to obejmować ustawienie limitów prądu, tryby kroków itp.
Funkcje produktu TB6600HG
• Przyjmij powiększony chłodnicy do dobrego rozpraszania ciepła
• Instrukcje konfiguracji podziału są wydrukowane z tyłu płyty
• Z funkcją ochrony zwarcia wyjściowego, bezproblemowe użycie
• Przyjmij szybkie sprzężenie optyczne 6N137, aby zapewnić dużą prędkość bez utraty synchronizacji
• Prąd wyjściowy jest Steplesko regulowany, aby zaspokoić różne potrzeby dotyczące aplikacji
• Korzystając z wspólnego trybu wprowadzania anody, istnieją dwa zaciski wejściowe, co sprawia, że okablowanie jest wygodniejsze
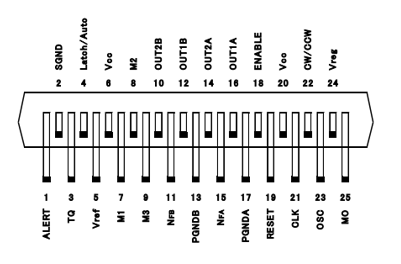
Konfiguracja PIN TB6600HG
Opis funkcji TB6600HG
Ustawienia wzbudzenia
Tryb wzbudzenia można wybrać z następujących ośmiu trybów przy użyciu wejść M1, M2 i M3.Gdy wejścia M1, M2 lub M3 są przesunięte podczas pracy silnika, nowy tryb wzbudzenia inicjuje tryb początkowy, potencjalnie zakłócając ciągłość przebiegu prądu wyjściowego.
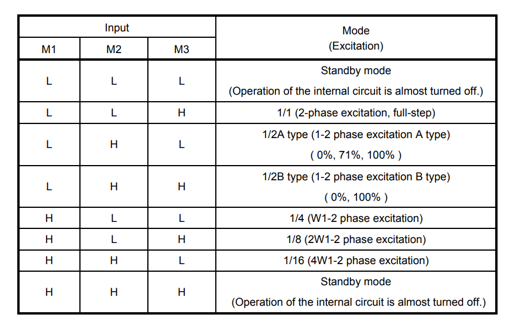
Uwaga: Aby zmienić tryb ekscytujący, zmieniając M1, M2 i M3, upewnij się, że nie ustawiaj m1 = m3 = m3 lub m1 = m2 = m3 = h.
Tryb gotowości
Tryb pracy przesuwa się do trybu gotowości pod warunkiem M1 = M2 = L lub M1 = M2 = M3 = H. Zużycie energii jest minimalizowane przez wyłączenie wszystkich operacji oprócz ochrony operacji.W trybie gotowości terminal wyjściowy MO wynosi Hz.Tryb gotowości jest uwalniany przez zmianę stanu M1 = M2 = M3 = L i M1 = M2 = M3 = H na inny stan.Sygnał wejściowy nie jest akceptowany przez około 200 μs po zwolnieniu trybu gotowości.
Tryb rozkładu
Ładowanie i rozładowanie prądu w trybie PWM zwykle wymaga około pięciu cykli w OSCM.40 -procentowy tryb szybkiego rozkładu jest inicjowany przez indukowanie rozpadu w ostatnich dwóch cyklach trybu szybkiego rozkładu, przy czym stosunek 40 procent pozostaje konsekwentnie ustalony.Zależność między częstotliwością zegara głównego (FMCLK), częstotliwością OSCM (FOSCM) i częstotliwością PWM (FCHOP) pokazano następująco:
foscm = 1/20 × fmclk
fchop = 1/100 × fmclk
Gdy ROSC = 51kΩ, zegar główny = 4 MHz, OSCM = 200 kHz, częstotliwość PWM (FChop) = 40 kHz.
Tryb początkowy
Po użyciu resetowania prądy fazowe są następujące.
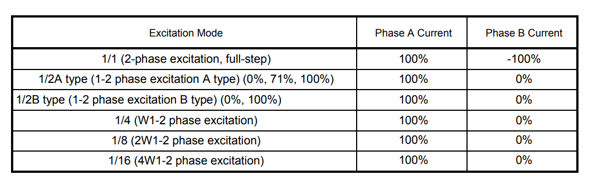
Obecny kierunek jest zdefiniowany w następujący sposób.
Out1a → Out2a: kierunek do przodu
OUT1B → OUT2B: Kierunek do przodu
Zastosowanie TB6600HG
Poniżej wymieniono niektóre zastosowania TB6600HG.
• Światła ogonowe
• Budynki gościnności
• Duży wyświetlacz LED na zewnątrz
• Alternatywa dla HID Lights
• Przemysłowe światła wysokiego baju
• Podświetlenie LED dużego formatu
• Podświetlenie LED wyświetlania
• Smartfony obsługujące aparat
• Topologie kierowcy lub przesuwania kierowców
Powszechne usterki i roztwory TB6600HG
Poniżej wymieniono kilka powszechnych błędów dotyczących TB6600HG i ich rozwiązań, które pomogą Ci podjąć szybkie działania podczas napotkania błędów i zabezpieczenia normalnego działania urządzenia.
Awaria pierwsza: przegrzanie układu sterownika
Sam układ TB6600HG jest zbyt gorący, prawdopodobnie z powodu nadmiernego obciążenia lub słabych warunków rozpraszania ciepła.
Rozwiązanie: Zwiększenie rozpraszania ciepła
Musimy dodać radiowlę lub wentylatory do układu kierowcy i silnika, aby upewnić się, że mogą one całkowicie rozproszyć ciepło podczas pracy.Jednocześnie musimy utrzymać środowisko wokół układu kierowcy i silnika dobrze wentylowanego, aby uniknąć przegrzania.
Awaria po drugie: silnik obraca się w niewłaściwym kierunku
Po otrzymaniu sygnału napędu kierunek obrotu nie jest zgodny z oczekiwanym, może to być sygnał sterujący jest zły lub układ napędu nie jest odpowiednio skonfigurowany.
Rozwiązanie: Sprawdź sygnał sterujący
Musimy dokładnie sprawdzić sygnały sterujące wysłane do TB6600HG, aby upewnić się, że sygnał sterowania kierunkiem i sygnał impulsu są prawidłowe.Jeśli do wysyłania sygnałów używany jest mikrokontroler, sprawdź kod programu i konfigurację pinu.
Awaria trzecia: silnik nie obraca się
Silnik nie reaguje po otrzymaniu sygnału napędu, może być tak, że układ sterownika nie działa poprawnie lub istnieje problem z połączeniem między silnikiem a układem sterownika.
Rozwiązanie: Sprawdź zasilacz i połączenie
Musimy upewnić się, że zasilacz TB6600HG jest normalny, a połączenie między silnikiem a układem sterownika jest solidne.Sprawdzamy napięcie i prąd w obwodzie za pomocą multimetru, aby upewnić się, że znajdują się w normalnym zakresie.
Awaria czwarta: poważne ogrzewanie silnika
Silnik generuje nadmierne ciepło podczas pracy, co może być spowodowane nadmiernym prądem lub złym rozpraszaniem ciepła.
Rozwiązanie: Dostosuj bieżące ustawienie
Jeśli silnik generuje poważne ciepło, możemy spróbować zmniejszyć prąd wyjściowy układu kierowcy.Dostosowując prądowy styk ustawienia TB6600HG, możemy skutecznie ograniczyć rozmiar prądu wyjściowego, co z kolei zmniejsza obciążenie silnika i zapewnia stabilne i bezpieczne działanie silnika.
Często zadawane pytania [FAQ]
1. Jaki jest zakres temperatur roboczych TB6600HG?
Temperatura robocza TB6600HG wynosi od -30 ° C do 85 ° C.
2. Co to jest TB6600HG?
TB6600HG to rodzaj sterownika silnika krokowego, zaprojektowany do sterowania silnikami krokowymi w różnych aplikacjach, takich jak maszyny CNC, drukarki 3D, robotyka i systemy automatyzacji.
3. Jakie są kluczowe cechy TB6600HG?
Funkcje TB6600HG obejmują regulowany prąd silnikowy, ustawienia rozdzielczości stopni, wbudowana ochrona przed przegrzaniem i izolowane wejścia do kontroli sygnału.